 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExTraCT -- Explainable Trajectory Corrections from language inputs using Textual description of features
Jan 08, 2024Natural language provides an intuitive and expressive way of conveying human intent to robots. Prior works employed end-to-end methods for learning trajectory deformations from language corrections. However, such methods do not generalize to new initial trajectories or object configurations. This work presents ExTraCT, a modular framework for trajectory corrections using natural language that combines Large Language Models (LLMs) for natural language understanding and trajectory deformation functions. Given a scene, ExTraCT generates the trajectory modification features (scene-specific and scene-independent) and their corresponding natural language textual descriptions for the objects in the scene online based on a template. We use LLMs for semantic matching of user utterances to the textual descriptions of features. Based on the feature matched, a trajectory modification function is applied to the initial trajectory, allowing generalization to unseen trajectories and object configurations. Through user studies conducted both in simulation and with a physical robot arm, we demonstrate that trajectories deformed using our method were more accurate and were preferred in about 80\% of cases, outperforming the baseline. We also showcase the versatility of our system in a manipulation task and an assistive feeding task.
Can a Humanoid Robot be part of the Organizational Workforce? A User Study Leveraging Sentiment Analysis
May 30, 2019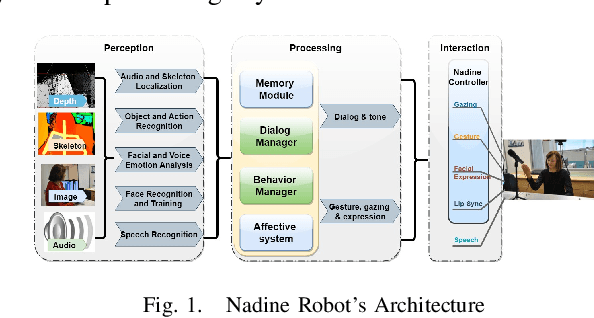
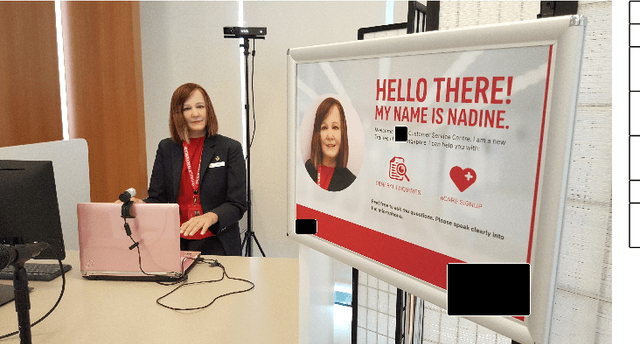
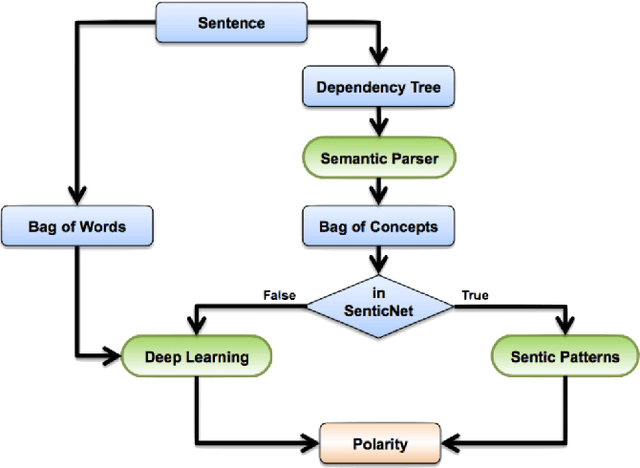
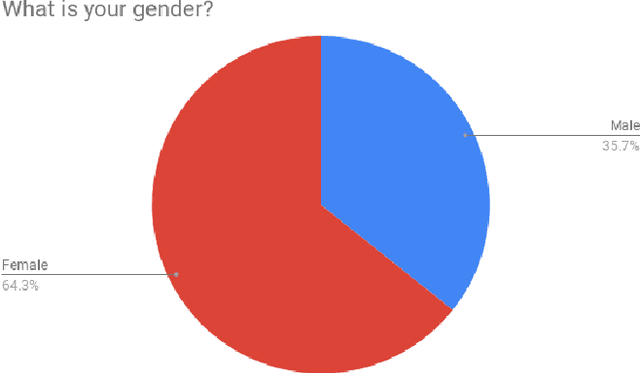
Hiring robots for the workplaces is a challenging task as robots have to cater to customer demands, follow organizational protocols and behave with social etiquette. In this study, we propose to have a humanoid social robot, Nadine, as a customer service agent in an open social work environment. The objective of this study is to analyze the effects of humanoid robots on customers at work environment, and see if it can handle social scenarios. We propose to evaluate these objectives through two modes, namely, survey questionnaire and customer feedback. We also propose a novel approach to analyze customer feedback data (text) using sentic computing methods. Specifically, we employ aspect extraction and sentiment analysis to analyze the data. From our framework, we detect sentiment associated to the aspects that mainly concerned the customers during their interaction. This allows us to understand customers expectations and current limitations of robots as employees.