 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Communicate and Correct Pose Errors
Nov 10, 2020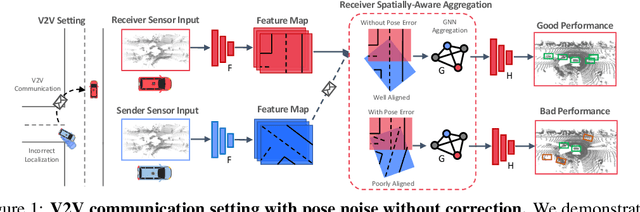
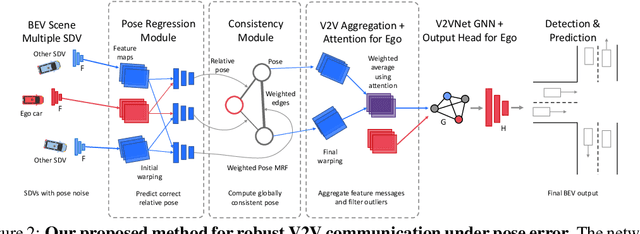
Learned communication makes multi-agent systems more effective by aggregating distributed information. However, it also exposes individual agents to the threat of erroneous messages they might receive. In this paper, we study the setting proposed in V2VNet, where nearby self-driving vehicles jointly perform object detection and motion forecasting in a cooperative manner. Despite a huge performance boost when the agents solve the task together, the gain is quickly diminished in the presence of pose noise since the communication relies on spatial transformations. Hence, we propose a novel neural reasoning framework that learns to communicate, to estimate potential errors, and finally, to reach a consensus about those errors. Experiments confirm that our proposed framework significantly improves the robustness of multi-agent self-driving perception and motion forecasting systems under realistic and severe localization noise.
Enabling Fast Differentially Private SGD via Just-in-Time Compilation and Vectorization
Oct 18, 2020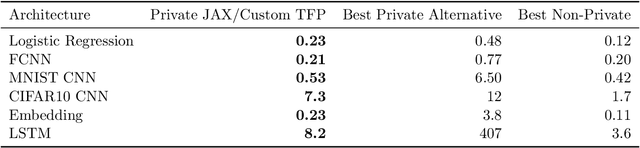
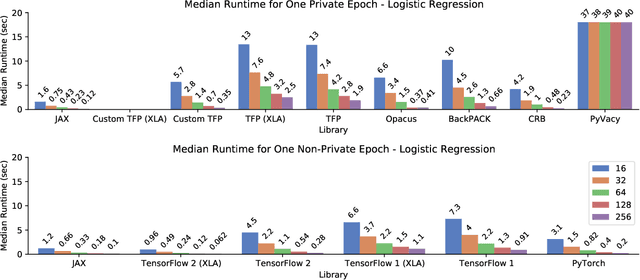
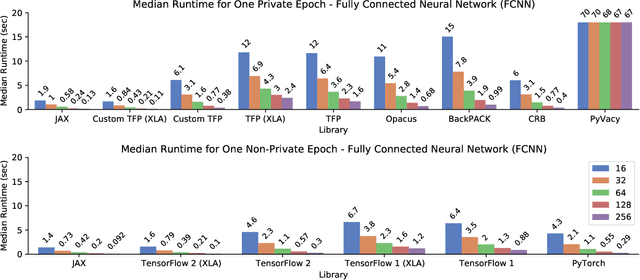
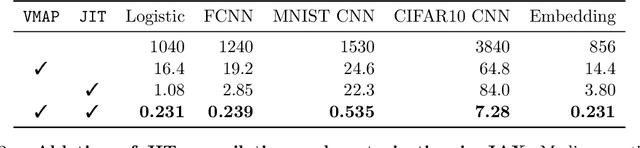
A common pain point in differentially private machine learning is the significant runtime overhead incurred when executing Differentially Private Stochastic Gradient Descent (DPSGD), which may be as large as two orders of magnitude. We thoroughly demonstrate that by exploiting powerful language primitives, including vectorization, just-in-time compilation, and static graph optimization, one can dramatically reduce these overheads, in many cases nearly matching the best non-private running times. These gains are realized in two frameworks: JAX and TensorFlow. JAX provides rich support for these primitives as core features of the language through the XLA compiler. We also rebuild core parts of TensorFlow Privacy, integrating features from TensorFlow 2 as well as XLA compilation, granting significant memory and runtime improvements over the current release version. These approaches allow us to achieve up to 50x speedups in comparison to the best alternatives. Our code is available at https://github.com/TheSalon/fast-dpsgd.