 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExperimental Comparison of Visual-Aided Odometry Methods for Rail Vehicles
Apr 01, 2019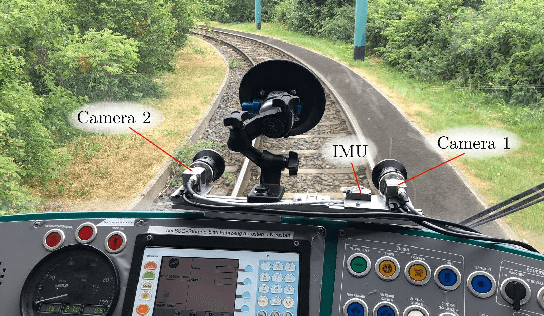
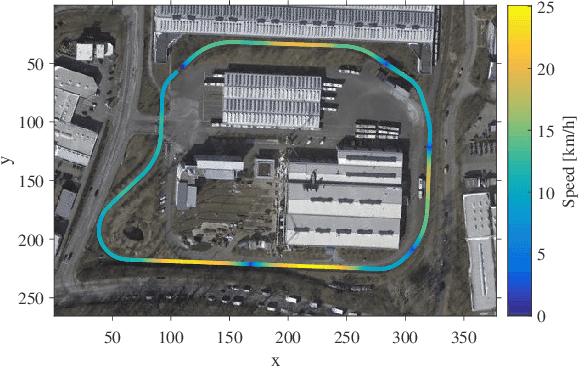
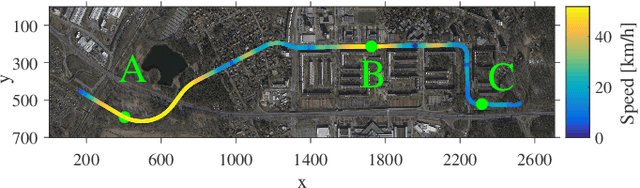
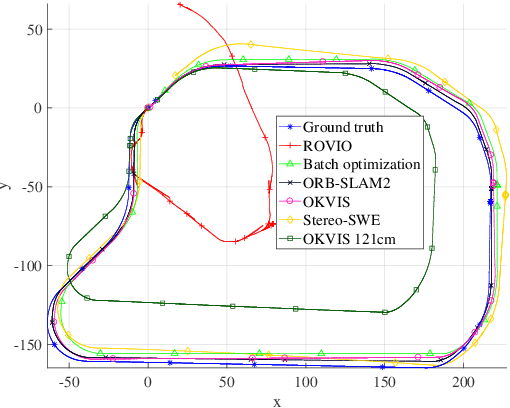
Today, rail vehicle localization is based on infrastructure-side Balises (beacons) together with on-board odometry to determine whether a rail segment is occupied. Such a coarse locking leads to a sub-optimal usage of the rail networks. New railway standards propose the use of moving blocks centered around the rail vehicles to increase the capacity of the network. However, this approach requires accurate and robust position and velocity estimation of all vehicles. In this work, we investigate the applicability, challenges and limitations of current visual and visual-inertial motion estimation frameworks for rail applications. An evaluation against RTK-GPS ground truth is performed on multiple datasets recorded in industrial, sub-urban, and forest environments. Our results show that stereo visual-inertial odometry has a great potential to provide a precise motion estimation because of its complementing sensor modalities and shows superior performance in challenging situations compared to other frameworks.
Robust Odometry using Sensor Consensus Analysis
Mar 06, 2018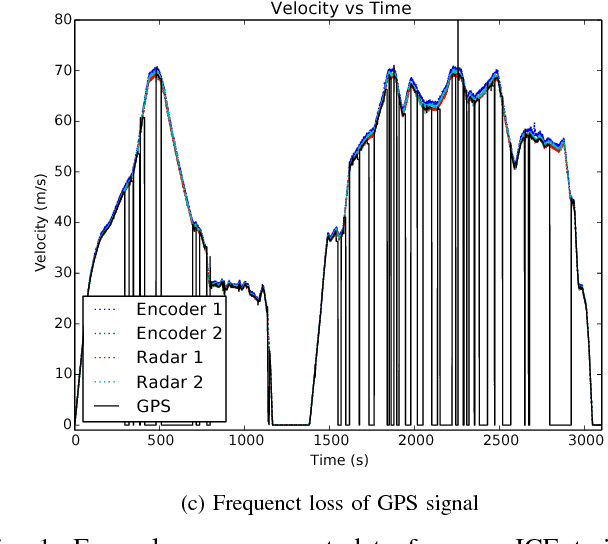
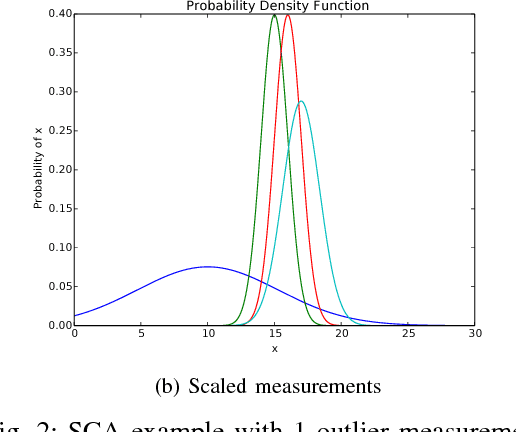

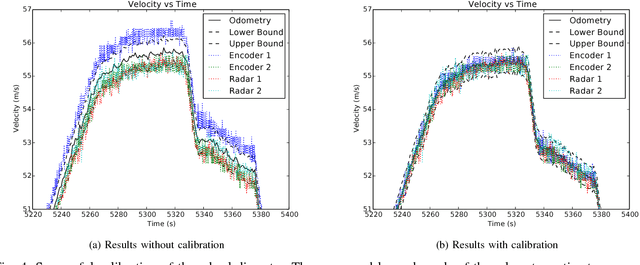
Odometry forms an important component of many manned and autonomous systems. In the rail industry in particular, having precise and robust odometry is crucial for the correct operation of the Automatic Train Protection systems that ensure the safety of high-speed trains in operation around the world. Two problems commonly encountered in such odometry systems are miscalibration of the wheel encoders and slippage of the wheels under acceleration and braking, resulting in incorrect velocity estimates. This paper introduces an odometry system that addresses these problems. It comprises of an Extended Kalman Filter that tracks the calibration of the wheel encoders as state variables, and a measurement pre-processing stage called Sensor Consensus Analysis (SCA) that scales the uncertainty of a measurement based on how consistent it is with the measurements of the other sensors. SCA uses the statistical z-test to determine when an individual measurement is inconsistent with the other measurements, and scales the uncertainty until the z-test passes. This system is demonstrated on data from German Intercity-Express high-speed trains and it is shown to successfully deal with errors due to miscalibration and wheel slip.