 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDInf-Grid: A Neural Differential Equation Solver with Differentiable Feature Grids
Jan 15, 2026We present a novel differentiable grid-based representation for efficiently solving differential equations (DEs). Widely used architectures for neural solvers, such as sinusoidal neural networks, are coordinate-based MLPs that are both computationally intensive and slow to train. Although grid-based alternatives for implicit representations (e.g., Instant-NGP and K-Planes) train faster by exploiting signal structure, their reliance on linear interpolation restricts their ability to compute higher-order derivatives, rendering them unsuitable for solving DEs. Our approach overcomes these limitations by combining the efficiency of feature grids with radial basis function interpolation, which is infinitely differentiable. To effectively capture high-frequency solutions and enable stable and faster computation of global gradients, we introduce a multi-resolution decomposition with co-located grids. Our proposed representation, DInf-Grid, is trained implicitly using the differential equations as loss functions, enabling accurate modelling of physical fields. We validate DInf-Grid on a variety of tasks, including the Poisson equation for image reconstruction, the Helmholtz equation for wave fields, and the Kirchhoff-Love boundary value problem for cloth simulation. Our results demonstrate a 5-20x speed-up over coordinate-based MLP-based methods, solving differential equations in seconds or minutes while maintaining comparable accuracy and compactness.
Thin-Shell-SfT: Fine-Grained Monocular Non-rigid 3D Surface Tracking with Neural Deformation Fields
Mar 25, 20253D reconstruction of highly deformable surfaces (e.g. cloths) from monocular RGB videos is a challenging problem, and no solution provides a consistent and accurate recovery of fine-grained surface details. To account for the ill-posed nature of the setting, existing methods use deformation models with statistical, neural, or physical priors. They also predominantly rely on nonadaptive discrete surface representations (e.g. polygonal meshes), perform frame-by-frame optimisation leading to error propagation, and suffer from poor gradients of the mesh-based differentiable renderers. Consequently, fine surface details such as cloth wrinkles are often not recovered with the desired accuracy. In response to these limitations, we propose ThinShell-SfT, a new method for non-rigid 3D tracking that represents a surface as an implicit and continuous spatiotemporal neural field. We incorporate continuous thin shell physics prior based on the Kirchhoff-Love model for spatial regularisation, which starkly contrasts the discretised alternatives of earlier works. Lastly, we leverage 3D Gaussian splatting to differentiably render the surface into image space and optimise the deformations based on analysis-bysynthesis principles. Our Thin-Shell-SfT outperforms prior works qualitatively and quantitatively thanks to our continuous surface formulation in conjunction with a specially tailored simulation prior and surface-induced 3D Gaussians. See our project page at https://4dqv.mpiinf.mpg.de/ThinShellSfT.
NeuralClothSim: Neural Deformation Fields Meet the Kirchhoff-Love Thin Shell Theory
Aug 24, 2023



Cloth simulation is an extensively studied problem, with a plethora of solutions available in computer graphics literature. Existing cloth simulators produce realistic cloth deformations that obey different types of boundary conditions. Nevertheless, their operational principle remains limited in several ways: They operate on explicit surface representations with a fixed spatial resolution, perform a series of discretised updates (which bounds their temporal resolution), and require comparably large amounts of storage. Moreover, back-propagating gradients through the existing solvers is often not straightforward, which poses additional challenges when integrating them into modern neural architectures. In response to the limitations mentioned above, this paper takes a fundamentally different perspective on physically-plausible cloth simulation and re-thinks this long-standing problem: We propose NeuralClothSim, i.e., a new cloth simulation approach using thin shells, in which surface evolution is encoded in neural network weights. Our memory-efficient and differentiable solver operates on a new continuous coordinate-based representation of dynamic surfaces, i.e., neural deformation fields (NDFs); it supervises NDF evolution with the rules of the non-linear Kirchhoff-Love shell theory. NDFs are adaptive in the sense that they 1) allocate their capacity to the deformation details as the latter arise during the cloth evolution and 2) allow surface state queries at arbitrary spatial and temporal resolutions without retraining. We show how to train our NeuralClothSim solver while imposing hard boundary conditions and demonstrate multiple applications, such as material interpolation and simulation editing. The experimental results highlight the effectiveness of our formulation and its potential impact.
State of the Art in Dense Monocular Non-Rigid 3D Reconstruction
Oct 27, 20223D reconstruction of deformable (or non-rigid) scenes from a set of monocular 2D image observations is a long-standing and actively researched area of computer vision and graphics. It is an ill-posed inverse problem, since--without additional prior assumptions--it permits infinitely many solutions leading to accurate projection to the input 2D images. Non-rigid reconstruction is a foundational building block for downstream applications like robotics, AR/VR, or visual content creation. The key advantage of using monocular cameras is their omnipresence and availability to the end users as well as their ease of use compared to more sophisticated camera set-ups such as stereo or multi-view systems. This survey focuses on state-of-the-art methods for dense non-rigid 3D reconstruction of various deformable objects and composite scenes from monocular videos or sets of monocular views. It reviews the fundamentals of 3D reconstruction and deformation modeling from 2D image observations. We then start from general methods--that handle arbitrary scenes and make only a few prior assumptions--and proceed towards techniques making stronger assumptions about the observed objects and types of deformations (e.g. human faces, bodies, hands, and animals). A significant part of this STAR is also devoted to classification and a high-level comparison of the methods, as well as an overview of the datasets for training and evaluation of the discussed techniques. We conclude by discussing open challenges in the field and the social aspects associated with the usage of the reviewed methods.
φ-SfT: Shape-from-Template with a Physics-Based Deformation Model
Mar 22, 2022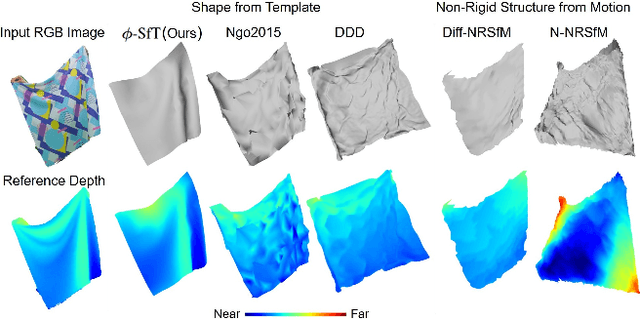

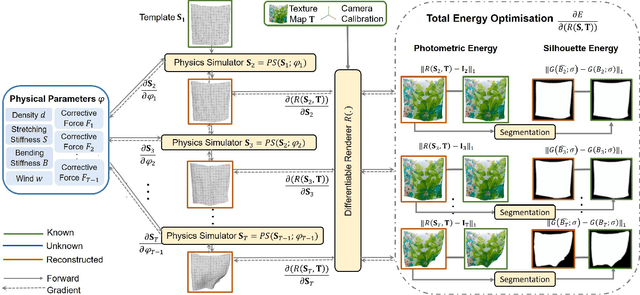
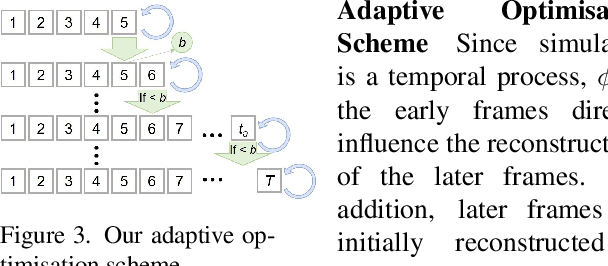
Shape-from-Template (SfT) methods estimate 3D surface deformations from a single monocular RGB camera while assuming a 3D state known in advance (a template). This is an important yet challenging problem due to the under-constrained nature of the monocular setting. Existing SfT techniques predominantly use geometric and simplified deformation models, which often limits their reconstruction abilities. In contrast to previous works, this paper proposes a new SfT approach explaining 2D observations through physical simulations accounting for forces and material properties. Our differentiable physics simulator regularises the surface evolution and optimises the material elastic properties such as bending coefficients, stretching stiffness and density. We use a differentiable renderer to minimise the dense reprojection error between the estimated 3D states and the input images and recover the deformation parameters using an adaptive gradient-based optimisation. For the evaluation, we record with an RGB-D camera challenging real surfaces exposed to physical forces with various material properties and textures. Our approach significantly reduces the 3D reconstruction error compared to multiple competing methods. For the source code and data, see https://4dqv.mpi-inf.mpg.de/phi-SfT/.