 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOvercoming Obstructions via Bandwidth-Limited Multi-Agent Spatial Handshaking
Jul 01, 2021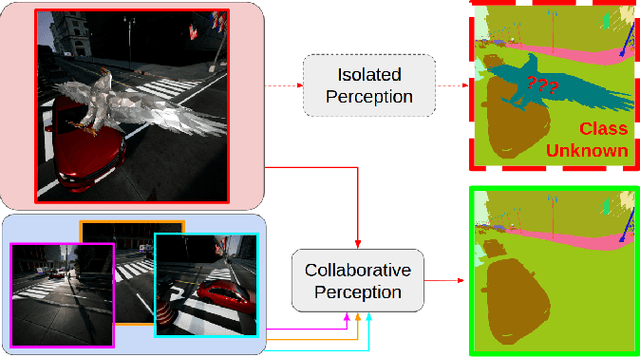
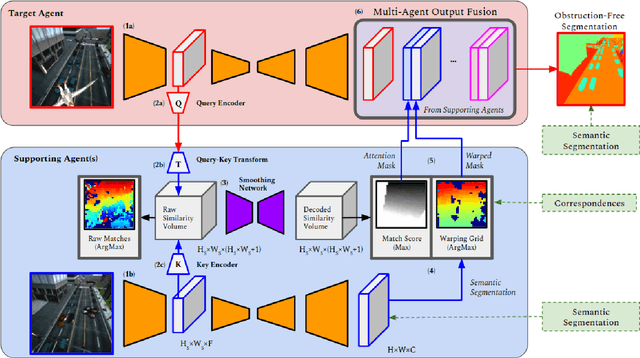
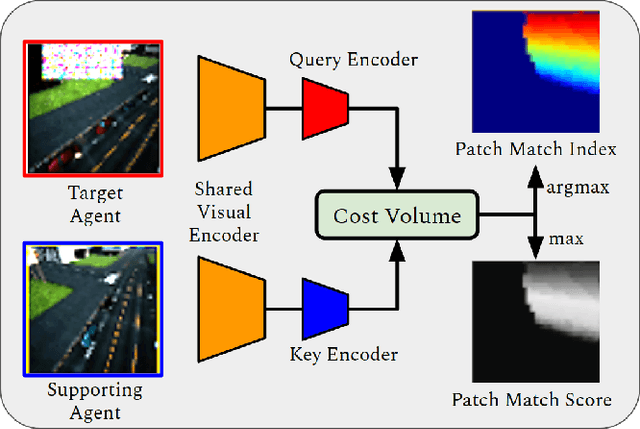
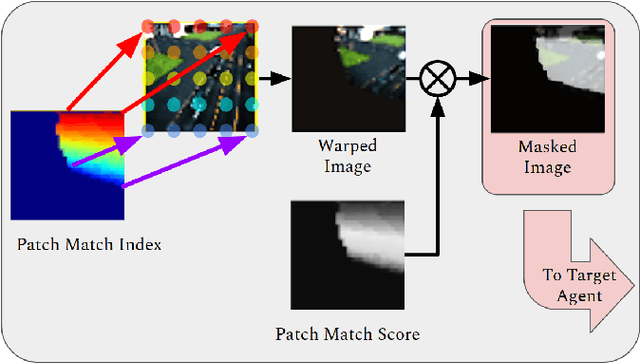
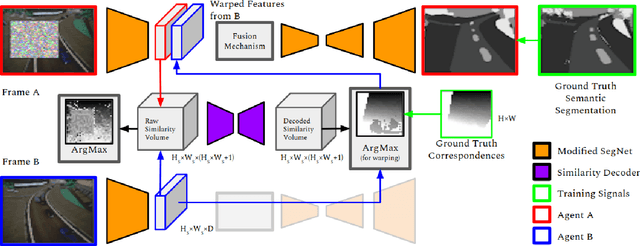
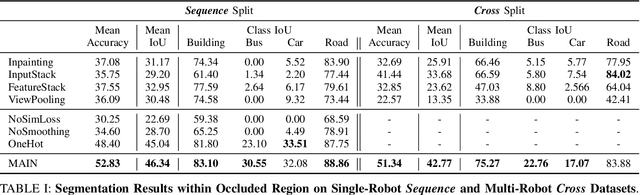
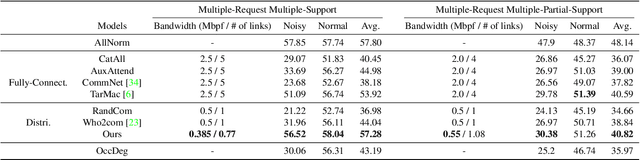
In this paper, we address bandwidth-limited and obstruction-prone collaborative perception, specifically in the context of multi-agent semantic segmentation. This setting presents several key challenges, including processing and exchanging unregistered robotic swarm imagery. To be successful, solutions must effectively leverage multiple non-static and intermittently-overlapping RGB perspectives, while heeding bandwidth constraints and overcoming unwanted foreground obstructions. As such, we propose an end-to-end learn-able Multi-Agent Spatial Handshaking network (MASH) to process, compress, and propagate visual information across a robotic swarm. Our distributed communication module operates directly (and exclusively) on raw image data, without additional input requirements such as pose, depth, or warping data. We demonstrate superior performance of our model compared against several baselines in a photo-realistic multi-robot AirSim environment, especially in the presence of image occlusions. Our method achieves an absolute 11% IoU improvement over strong baselines.
Enhancing Multi-Robot Perception via Learned Data Association
Jul 01, 2021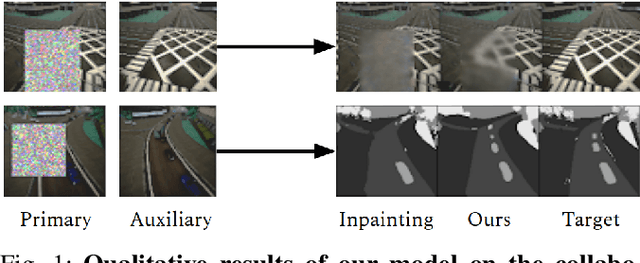
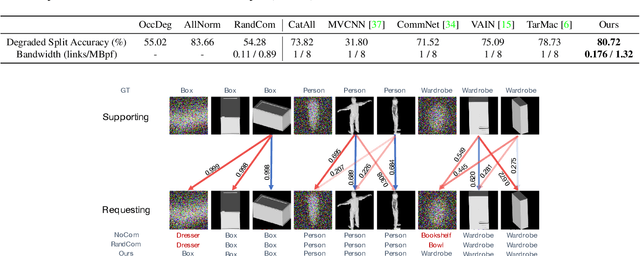
In this paper, we address the multi-robot collaborative perception problem, specifically in the context of multi-view infilling for distributed semantic segmentation. This setting entails several real-world challenges, especially those relating to unregistered multi-agent image data. Solutions must effectively leverage multiple, non-static, and intermittently-overlapping RGB perspectives. To this end, we propose the Multi-Agent Infilling Network: an extensible neural architecture that can be deployed (in a distributed manner) to each agent in a robotic swarm. Specifically, each robot is in charge of locally encoding and decoding visual information, and an extensible neural mechanism allows for an uncertainty-aware and context-based exchange of intermediate features. We demonstrate improved performance on a realistic multi-robot AirSim dataset.
When2com: Multi-Agent Perception via Communication Graph Grouping
Jun 02, 2020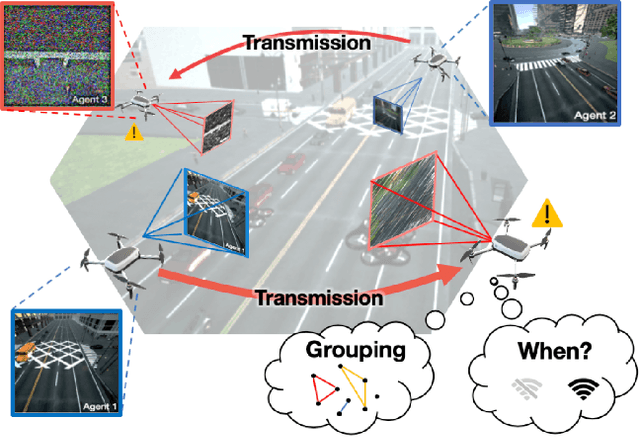

While significant advances have been made for single-agent perception, many applications require multiple sensing agents and cross-agent communication due to benefits such as coverage and robustness. It is therefore critical to develop frameworks which support multi-agent collaborative perception in a distributed and bandwidth-efficient manner. In this paper, we address the collaborative perception problem, where one agent is required to perform a perception task and can communicate and share information with other agents on the same task. Specifically, we propose a communication framework by learning both to construct communication groups and decide when to communicate. We demonstrate the generalizability of our framework on two different perception tasks and show that it significantly reduces communication bandwidth while maintaining superior performance.
Online Center of Mass Estimation for a Humanoid Wheeled Inverted Pendulum Robot
Oct 07, 2018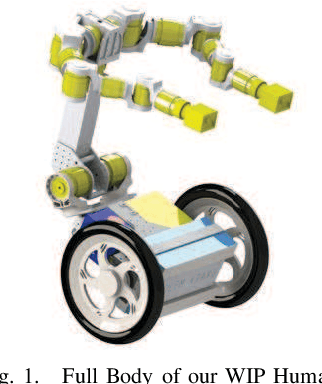
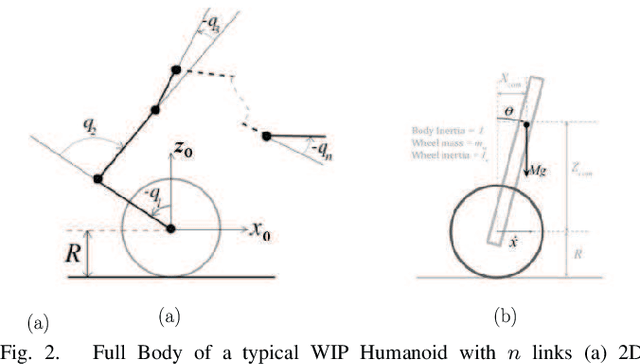
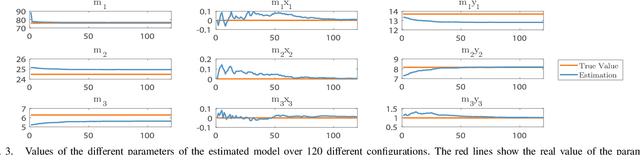
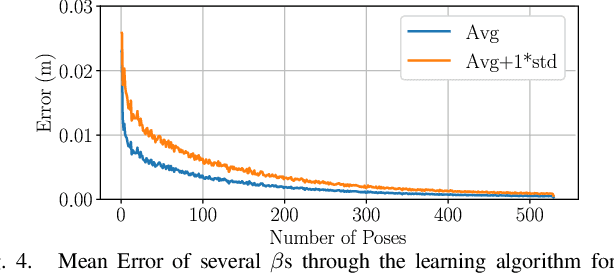
We present a novel application of robust control and online learning for the balancing of a n Degree of Freedom (DoF), Wheeled Inverted Pendulum (WIP) humanoid robot. Our technique condenses the inaccuracies of a mass model into a Center of Mass (CoM) error, balances despite this error, and uses online learning to update the mass model for a better CoM estimate. Using a simulated model of our robot, we meta-learn a set of excitory joint poses that makes our gradient descent algorithm quickly converge to an accurate (CoM) estimate. This simulated pipeline executes in a fully online fashion, using active disturbance rejection to address the mass errors that result from a steadily evolving mass model. Experiments were performed on a 19 DoF WIP, in which we manually acquired the data for the learned set of poses and show that the mass model produced by a gradient descent produces a CoM estimate that improves overall control and efficiency. This work contributes to a greater corpus of whole body control on the Golem Krang humanoid robot.