 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Center of Mass Estimation for a Humanoid Wheeled Inverted Pendulum Robot
Oct 07, 2018
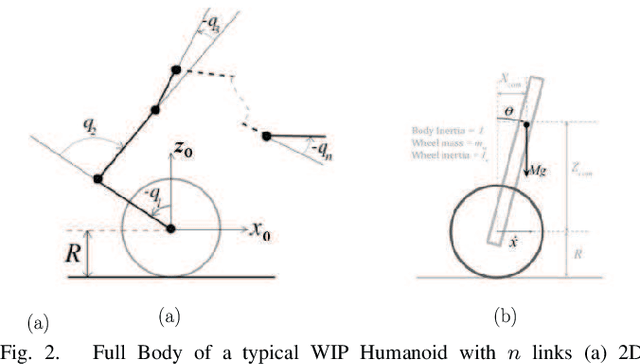
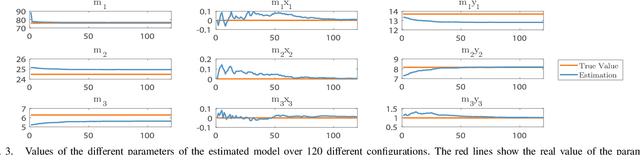
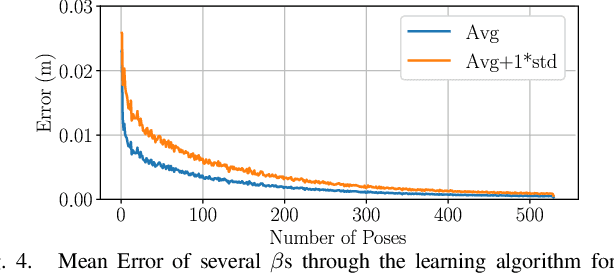
We present a novel application of robust control and online learning for the balancing of a n Degree of Freedom (DoF), Wheeled Inverted Pendulum (WIP) humanoid robot. Our technique condenses the inaccuracies of a mass model into a Center of Mass (CoM) error, balances despite this error, and uses online learning to update the mass model for a better CoM estimate. Using a simulated model of our robot, we meta-learn a set of excitory joint poses that makes our gradient descent algorithm quickly converge to an accurate (CoM) estimate. This simulated pipeline executes in a fully online fashion, using active disturbance rejection to address the mass errors that result from a steadily evolving mass model. Experiments were performed on a 19 DoF WIP, in which we manually acquired the data for the learned set of poses and show that the mass model produced by a gradient descent produces a CoM estimate that improves overall control and efficiency. This work contributes to a greater corpus of whole body control on the Golem Krang humanoid robot.