 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Center of Mass Estimation for a Humanoid Wheeled Inverted Pendulum Robot
Oct 07, 2018
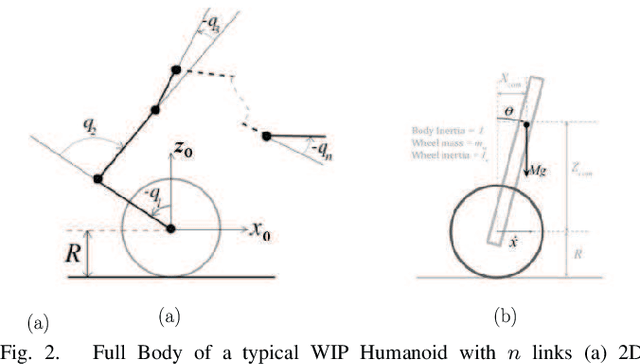
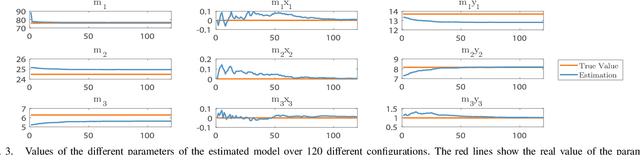
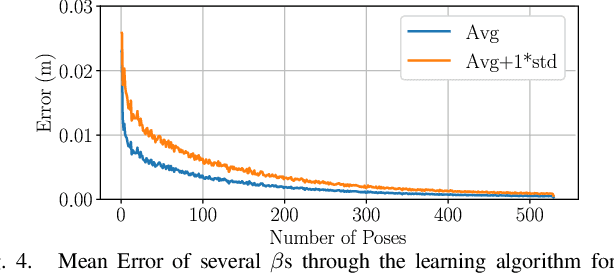
We present a novel application of robust control and online learning for the balancing of a n Degree of Freedom (DoF), Wheeled Inverted Pendulum (WIP) humanoid robot. Our technique condenses the inaccuracies of a mass model into a Center of Mass (CoM) error, balances despite this error, and uses online learning to update the mass model for a better CoM estimate. Using a simulated model of our robot, we meta-learn a set of excitory joint poses that makes our gradient descent algorithm quickly converge to an accurate (CoM) estimate. This simulated pipeline executes in a fully online fashion, using active disturbance rejection to address the mass errors that result from a steadily evolving mass model. Experiments were performed on a 19 DoF WIP, in which we manually acquired the data for the learned set of poses and show that the mass model produced by a gradient descent produces a CoM estimate that improves overall control and efficiency. This work contributes to a greater corpus of whole body control on the Golem Krang humanoid robot.
Hierarchical Optimization for Whole-Body Control of Wheeled Inverted Pendulum Humanoids
Oct 07, 2018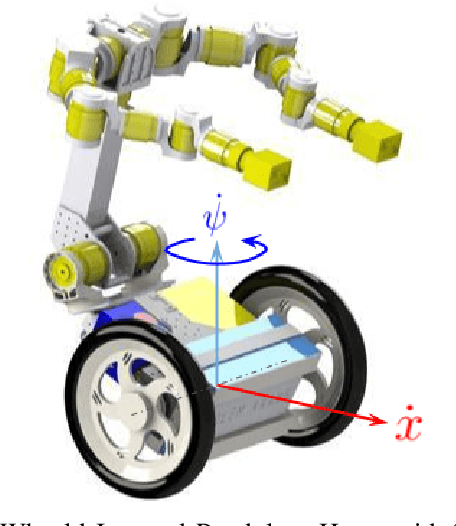
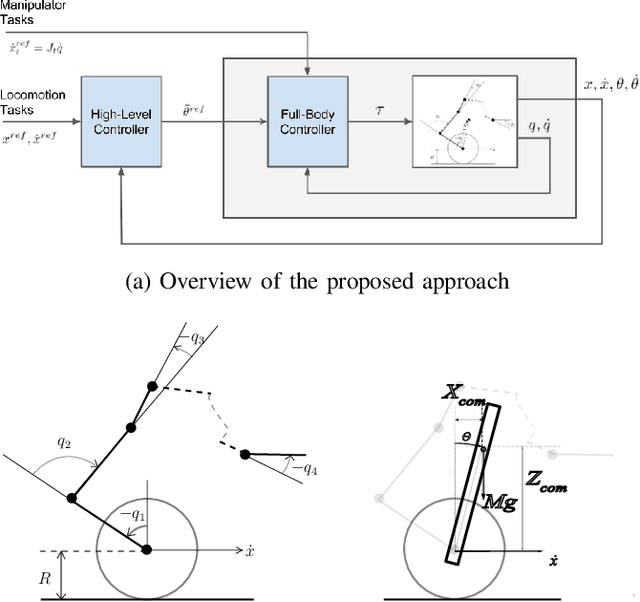

In this paper, we present a whole-body control framework for Wheeled Inverted Pendulum (WIP) Humanoids. WIP Humanoids are redundant manipulators dynamically balancing themselves on wheels. Characterized by several degrees of freedom, they have the ability to perform several tasks simultaneously, such as balancing, maintaining a body pose, controlling the gaze, lifting a load or maintaining end-effector configuration in operation space. The problem of whole-body control is to enable simultaneous performance of these tasks with optimal participation of all degrees of freedom at specified priorities for each objective. The control also has to obey constraint of angle and torque limits on each joint. The proposed approach is hierarchical with a low level controller for body joints manipulation and a high-level controller that defines center of mass (CoM) targets for the low-level controller to control zero dynamics of the system driving the wheels. The low-level controller plans for shorter horizons while considering more complete dynamics of the system, while the high-level controller plans for longer horizon based on an approximate model of the robot for computational efficiency.