 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Control of Truss Robots Using Consensus Alternating Direction Method of Multipliers
Aug 14, 2021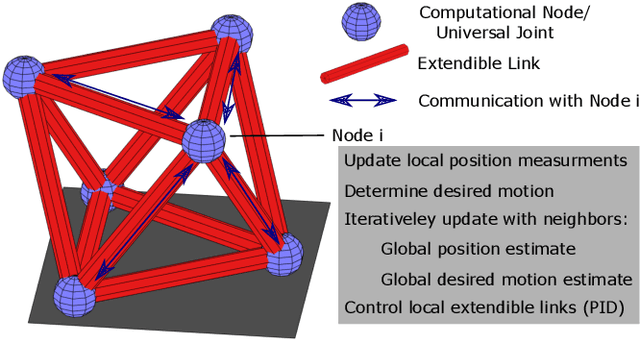
Truss robots, or robots that consist of extensible links connected at universal joints, are often designed with modular physical components but require centralized control techniques. This paper presents a distributed control technique for truss robots. The truss robot is viewed as a collective, where each individual node of the robot is capable of measuring the lengths of the neighboring edges, communicating with a subset of the other nodes, and computing and executing its own control actions with its connected edges. Through an iterative distributed optimization, the individual members utilize local information to converge on a global estimate of the robot's state, and then coordinate their planned motion to achieve desired global behavior. This distributed optimization is based on a consensus alternating direction method of multipliers framework. This distributed algorithm is then adapted to control an isoperimetric truss robot, and the distributed algorithm is used in an experimental demonstration. The demonstration allows a user to broadcast commands to a single node of the robot, which then ensures the coordinated motion of all other nodes to achieve the desired global motion.
Geometric Solutions for General Actuator Routing on Inflated-Beam Soft Growing Robots
Jun 10, 2020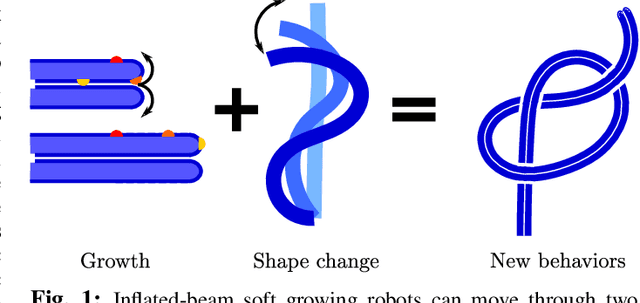
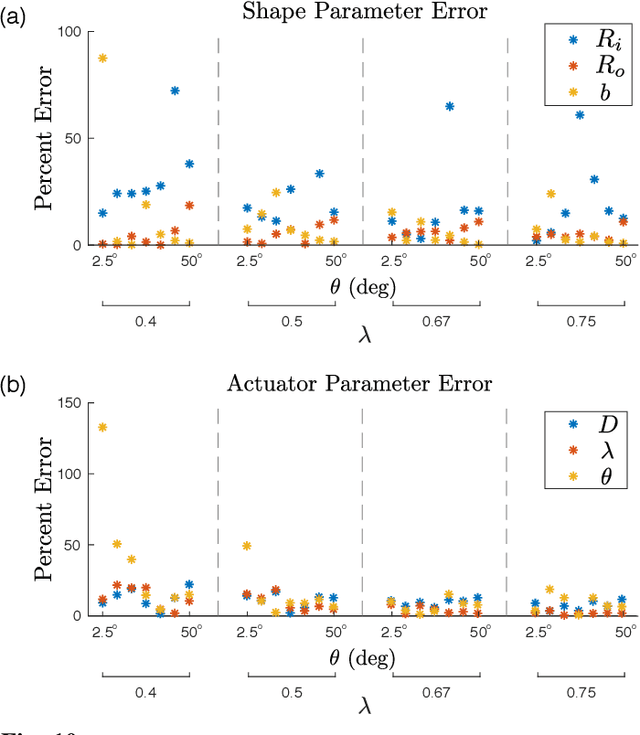
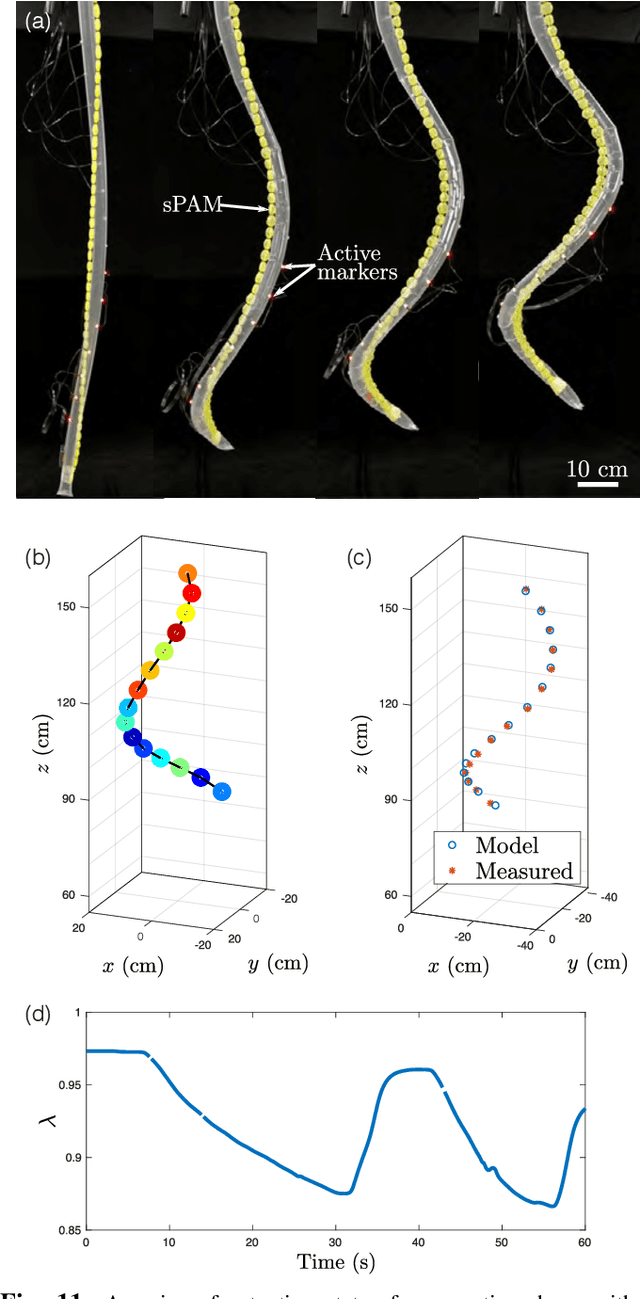
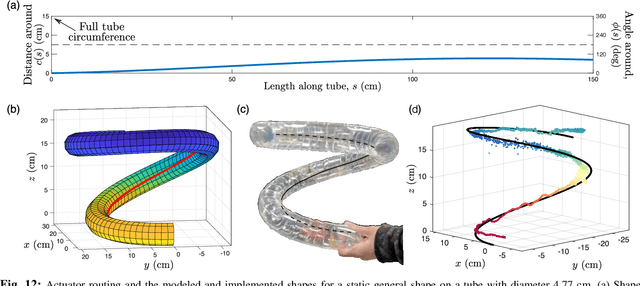
Continuum and soft robots can leverage complex actuator shapes to take on useful shapes while actuating only a few of their many degrees of freedom. Continuum robots that also grow increase the range of potential shapes that can be actuated and enable easier access to constrained environments. Existing models for describing the complex kinematics involved in general actuation of continuum robots rely on simulation or well-behaved stress-strain relationships, but the non-linear behavior of the thin-walled inflated-beams used in growing robots makes these techniques difficult to apply. Here we derive kinematic models of single, generally routed tendon paths on a soft pneumatic backbone of inextensible but flexible material from geometric relationships alone. This allows for forward modeling of the resulting shapes with only knowledge of the geometry of the system. We show that this model can accurately predict the shape of the whole robot body and how the model changes with actuation type. We also demonstrate the use of this kinematic model for inverse design, where actuator designs are found based on desired final robot shapes. We deploy these designed actuators on soft pneumatic growing robots to show the benefits of simultaneous growth and shape change.
Retraction of Soft Growing Robots without Buckling
Oct 25, 2019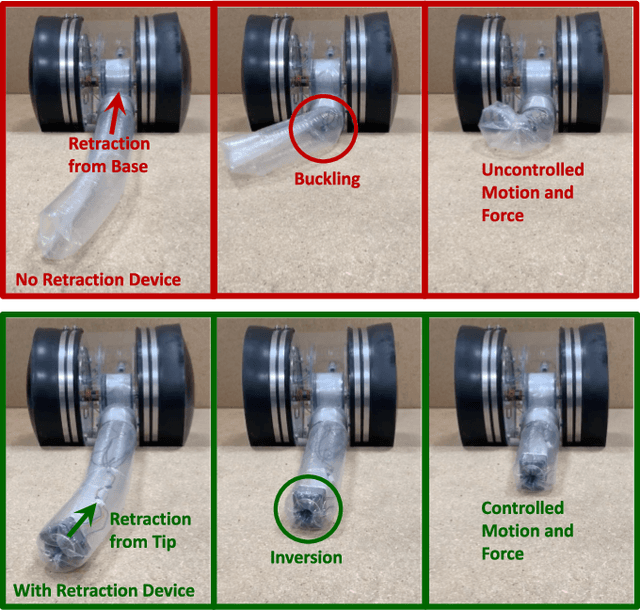
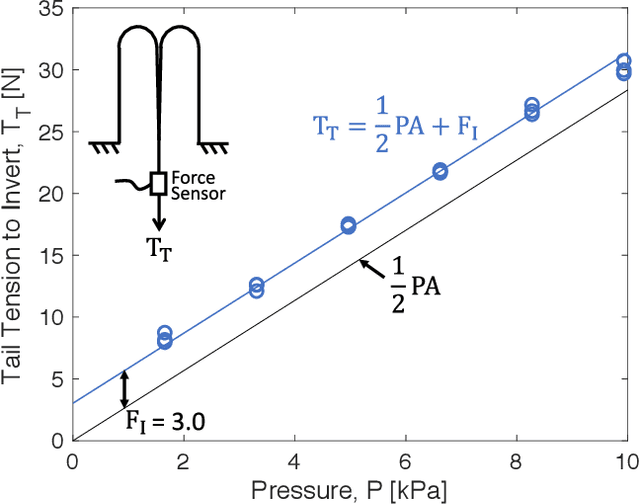
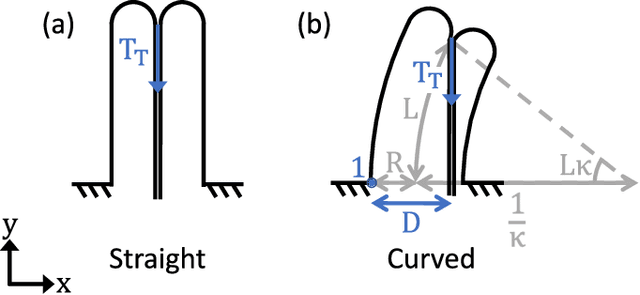
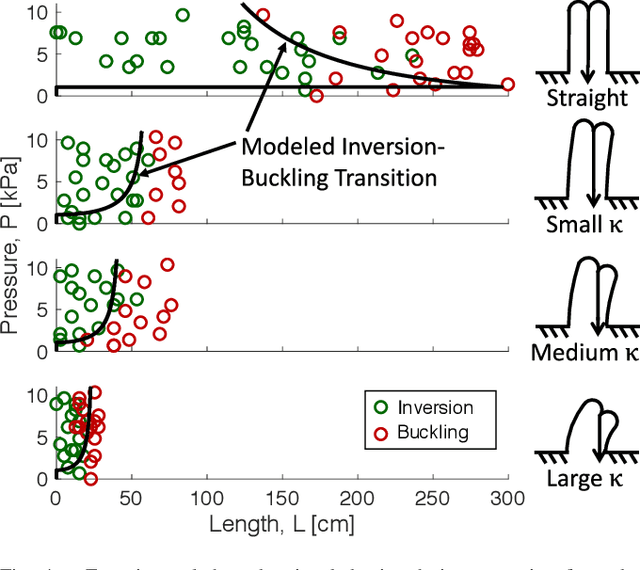
Tip-extending soft robots that "grow" via pneumatic eversion of their body material have demonstrated applications in exploration of cluttered environments. During growth, the motion and force of the robot tip can be controlled in three degrees of freedom using actuators that direct the tip in combination with extension. However, when reversal of the growth process is attempted by retracting the internal body material from the base, the robot body often responds by buckling rather than inversion of its body material, which makes control of tip motion and force impossible. We present and validate a model to predict when buckling occurs instead of inversion during retraction, and we present and evaluate an electromechanical device that can be added to a tip-extending soft robot to prevent buckling during retraction and enable control of all three degrees of freedom of tip actuation during inversion. Using our retraction device, we demonstrate completion of three previously impossible tasks: exploring different branches of a forking path, reversing growth while applying minimal force on the environment, and bringing back environment samples to the base.