 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Control of Truss Robots Using Consensus Alternating Direction Method of Multipliers
Paper and Code
Aug 14, 2021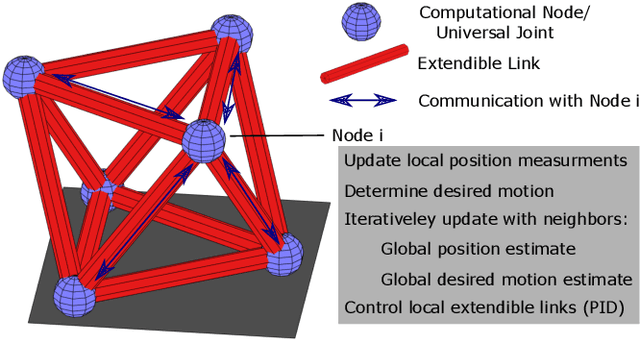
Truss robots, or robots that consist of extensible links connected at universal joints, are often designed with modular physical components but require centralized control techniques. This paper presents a distributed control technique for truss robots. The truss robot is viewed as a collective, where each individual node of the robot is capable of measuring the lengths of the neighboring edges, communicating with a subset of the other nodes, and computing and executing its own control actions with its connected edges. Through an iterative distributed optimization, the individual members utilize local information to converge on a global estimate of the robot's state, and then coordinate their planned motion to achieve desired global behavior. This distributed optimization is based on a consensus alternating direction method of multipliers framework. This distributed algorithm is then adapted to control an isoperimetric truss robot, and the distributed algorithm is used in an experimental demonstration. The demonstration allows a user to broadcast commands to a single node of the robot, which then ensures the coordinated motion of all other nodes to achieve the desired global motion.