 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Wearable Resistance Devices Motor Learning Effects in Exercise
May 24, 2024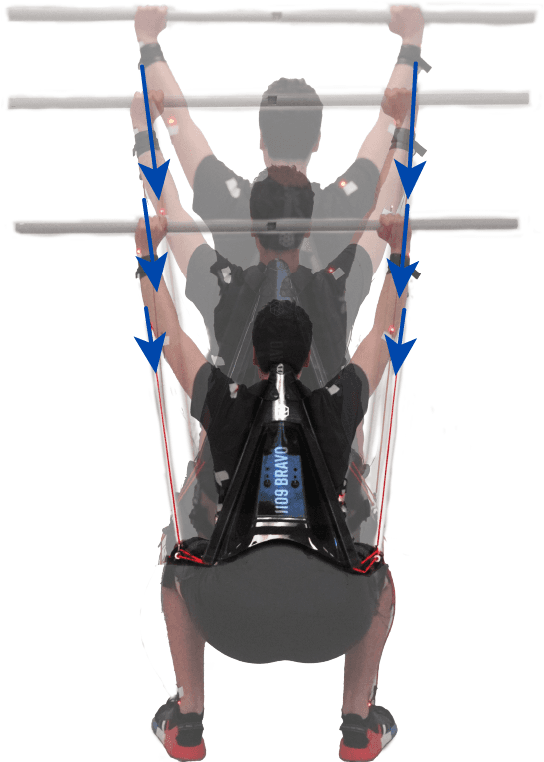
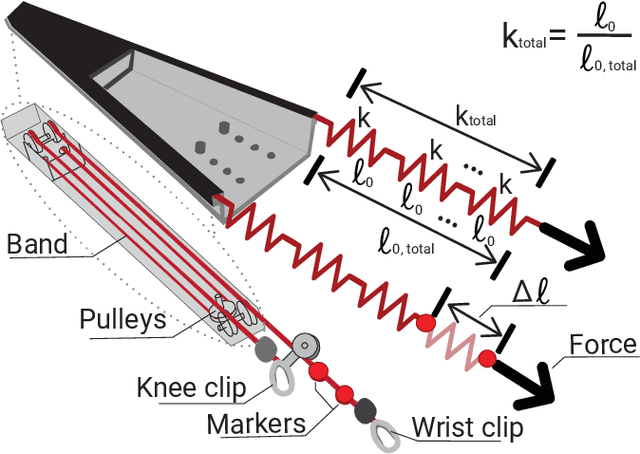
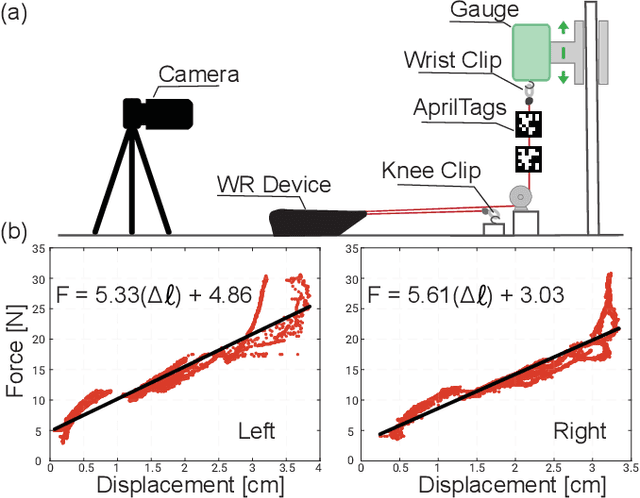
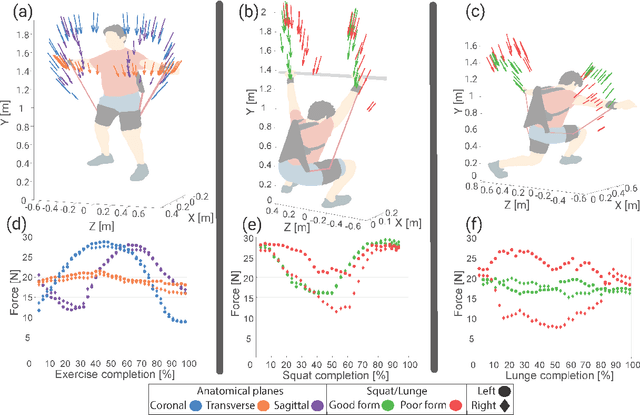
The integration of technology into exercise regimens has emerged as a strategy to enhance normal human capabilities and return human motor function after injury or illness by enhancing motor learning and retention. Much research has focused on how active devices, whether confined to a lab or made into a wearable format, can apply forces at set times and conditions to optimize the process of learning. However, the focus on active force production often forces devices to either be confined to simple movements or interventions. As such, in this paper, we investigate how passive device behaviors can contribute to the process of motor learning by themselves. Our approach involves using a wearable resistance (WR) device, which is outfitted with elastic bands, to apply a force field that changes in response to a person's movements while performing exercises. We develop a method to measure the produced forces from the device without impeding the function and we characterize the device's force generation abilities. We then present a study assessing the impact of the WR device on motor learning of proper squat form compared to visual or no feedback. Biometrics such as knee and hip angles were used to monitor and assess subject performance. Our findings indicate that the force fields produced while training with the WR device can improve performance in full-body exercises similarly to a more direct visual feedback mechanism, though the improvement is not consistent across all performance metrics. Through our research, we contribute important insights into the application of passive wearable resistance technology in practical exercise settings.
Geometric Solutions for General Actuator Routing on Inflated-Beam Soft Growing Robots
Jun 10, 2020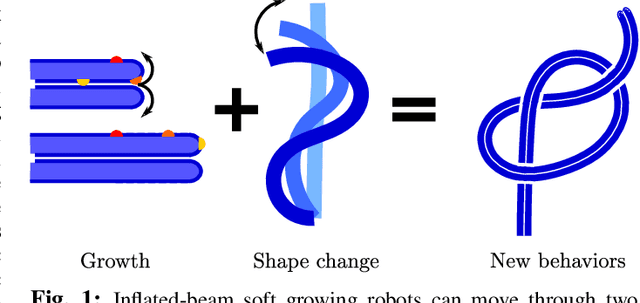
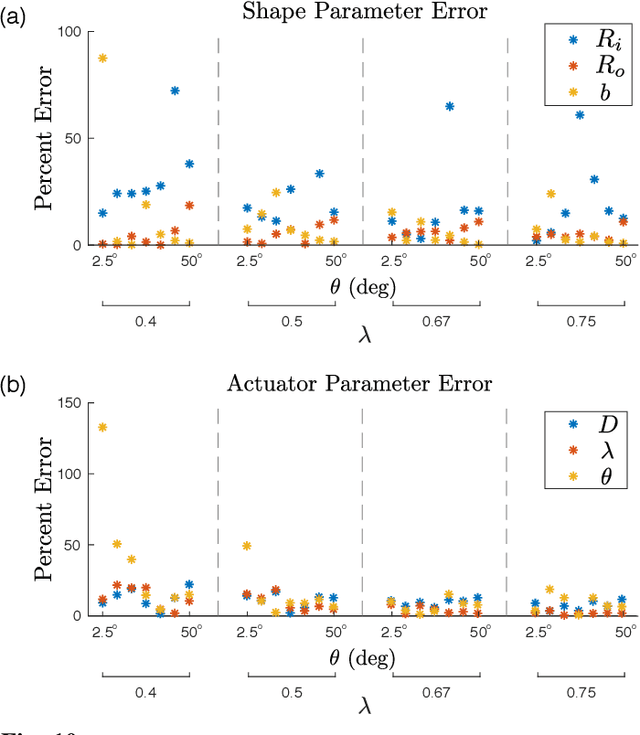
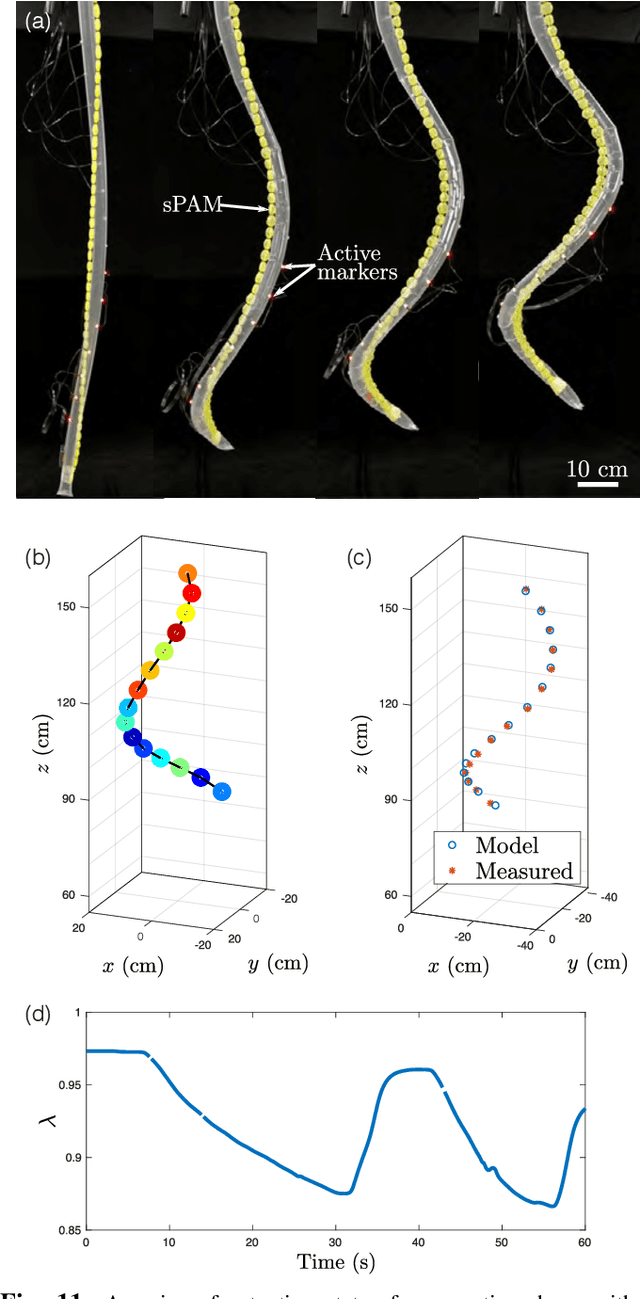
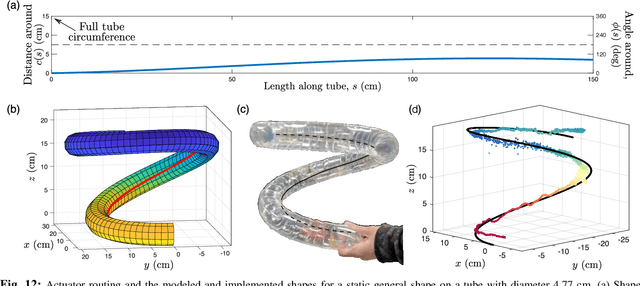
Continuum and soft robots can leverage complex actuator shapes to take on useful shapes while actuating only a few of their many degrees of freedom. Continuum robots that also grow increase the range of potential shapes that can be actuated and enable easier access to constrained environments. Existing models for describing the complex kinematics involved in general actuation of continuum robots rely on simulation or well-behaved stress-strain relationships, but the non-linear behavior of the thin-walled inflated-beams used in growing robots makes these techniques difficult to apply. Here we derive kinematic models of single, generally routed tendon paths on a soft pneumatic backbone of inextensible but flexible material from geometric relationships alone. This allows for forward modeling of the resulting shapes with only knowledge of the geometry of the system. We show that this model can accurately predict the shape of the whole robot body and how the model changes with actuation type. We also demonstrate the use of this kinematic model for inverse design, where actuator designs are found based on desired final robot shapes. We deploy these designed actuators on soft pneumatic growing robots to show the benefits of simultaneous growth and shape change.