 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnisotropic Stiffness and Programmable Actuation for Soft Robots Enabled by an Inflated Rotational Joint
Oct 16, 2024



Soft robots are known for their ability to perform tasks with great adaptability, enabled by their distributed, non-uniform stiffness and actuation. Bending is the most fundamental motion for soft robot design, but creating robust, and easy-to-fabricate soft bending joint with tunable properties remains an active problem of research. In this work, we demonstrate an inflatable actuation module for soft robots with a defined bending plane enabled by forced partial wrinkling. This lowers the structural stiffness in the bending direction, with the final stiffness easily designed by the ratio of wrinkled and unwrinkled regions. We present models and experimental characterization showing the stiffness properties of the actuation module, as well as its ability to maintain the kinematic constraint over a large range of loading conditions. We demonstrate the potential for complex actuation in a soft continuum robot and for decoupling actuation force and efficiency from load capacity. The module provides a novel method for embedding intelligent actuation into soft pneumatic robots.
A Wearable Resistance Devices Motor Learning Effects in Exercise
May 24, 2024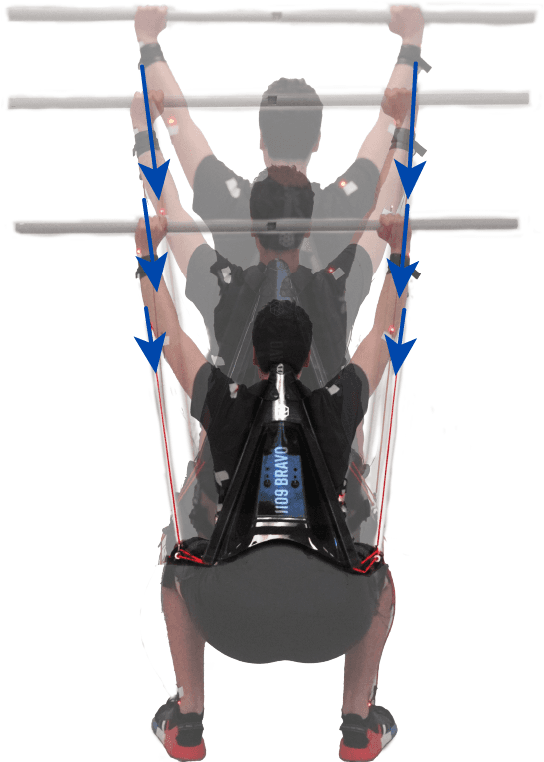
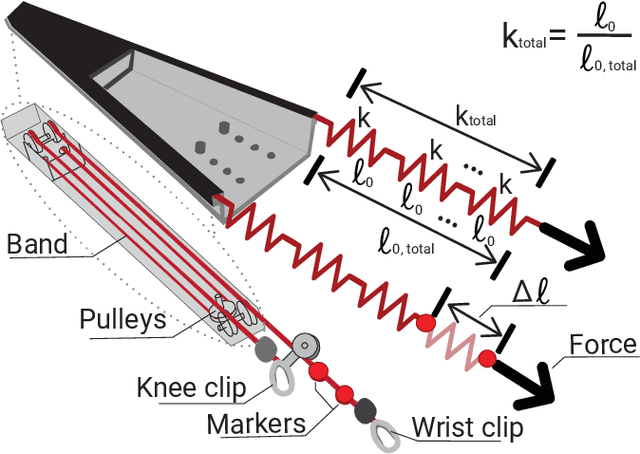
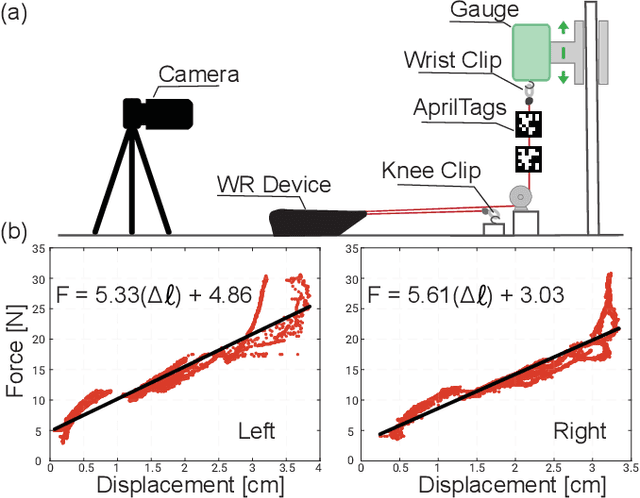
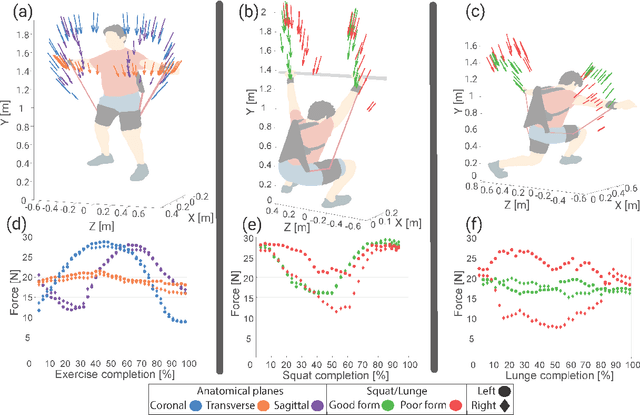
The integration of technology into exercise regimens has emerged as a strategy to enhance normal human capabilities and return human motor function after injury or illness by enhancing motor learning and retention. Much research has focused on how active devices, whether confined to a lab or made into a wearable format, can apply forces at set times and conditions to optimize the process of learning. However, the focus on active force production often forces devices to either be confined to simple movements or interventions. As such, in this paper, we investigate how passive device behaviors can contribute to the process of motor learning by themselves. Our approach involves using a wearable resistance (WR) device, which is outfitted with elastic bands, to apply a force field that changes in response to a person's movements while performing exercises. We develop a method to measure the produced forces from the device without impeding the function and we characterize the device's force generation abilities. We then present a study assessing the impact of the WR device on motor learning of proper squat form compared to visual or no feedback. Biometrics such as knee and hip angles were used to monitor and assess subject performance. Our findings indicate that the force fields produced while training with the WR device can improve performance in full-body exercises similarly to a more direct visual feedback mechanism, though the improvement is not consistent across all performance metrics. Through our research, we contribute important insights into the application of passive wearable resistance technology in practical exercise settings.