 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeElevated LiDAR based Sensing for 6G -- 3D Maps with cm Level Accuracy
Feb 22, 2021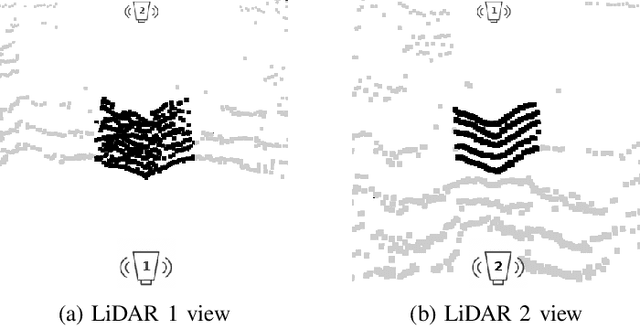
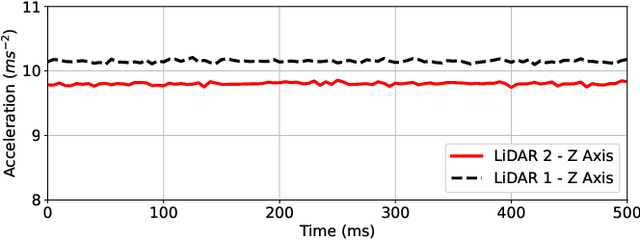
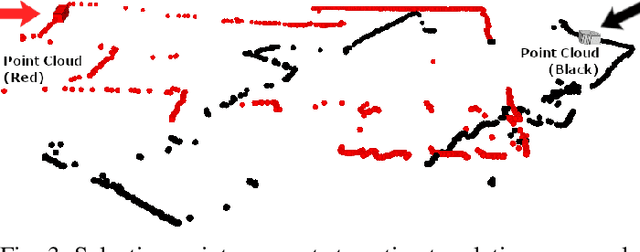
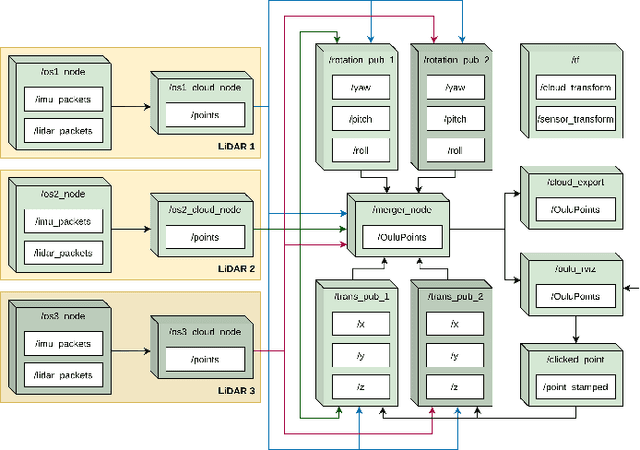
One key vertical application that will be enabled by 6G is the automation of the processes with the increased use of robots. As a result, sensing and localization of the surrounding environment becomes a crucial factor for these robots to operate. Light detection and ranging (LiDAR) has emerged as an appropriate method of sensing due to its capability of generating detail-rich information with high accuracy. However, LiDARs are power hungry devices that generate a lot of data, and these characteristics limit their use as on-board sensors in robots. In this paper, we present a novel approach on the methodology of generating an enhanced 3D map with improved field-of-view using multiple LiDAR sensors. We utilize an inherent property of LiDAR point clouds; rings and data from the inertial measurement unit (IMU) embedded in the sensor for registration of the point clouds. The generated 3D map has an accuracy of 10 cm when compared to the real-world measurements. We also carry out the practical implementation of the proposed method using two LiDAR sensors. Furthermore, we develop an application to utilize the generated map where a robot navigates through the mapped environment with minimal support from the sensors on-board. The LiDARs are fixed in the infrastructure at elevated positions. Thus this is applicable to vehicular and factory scenarios. Our results further validate the idea of using multiple elevated LiDARs as a part of the infrastructure for various applications.
Autonomous Driving without a Burden: View from Outside with Elevated LiDAR
Oct 31, 2018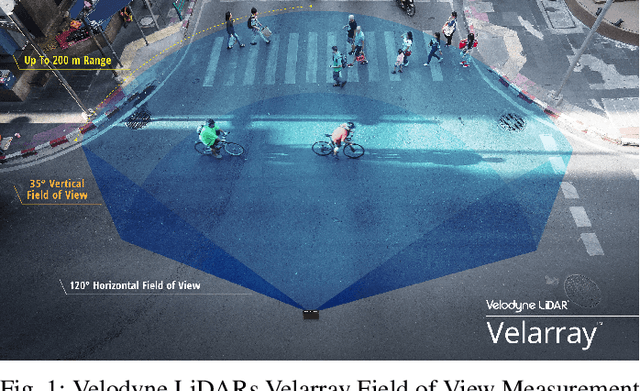
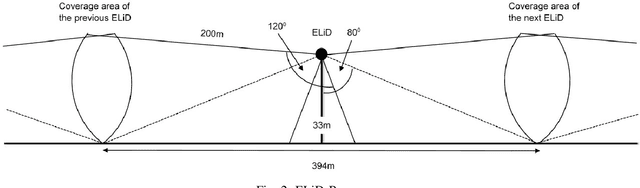
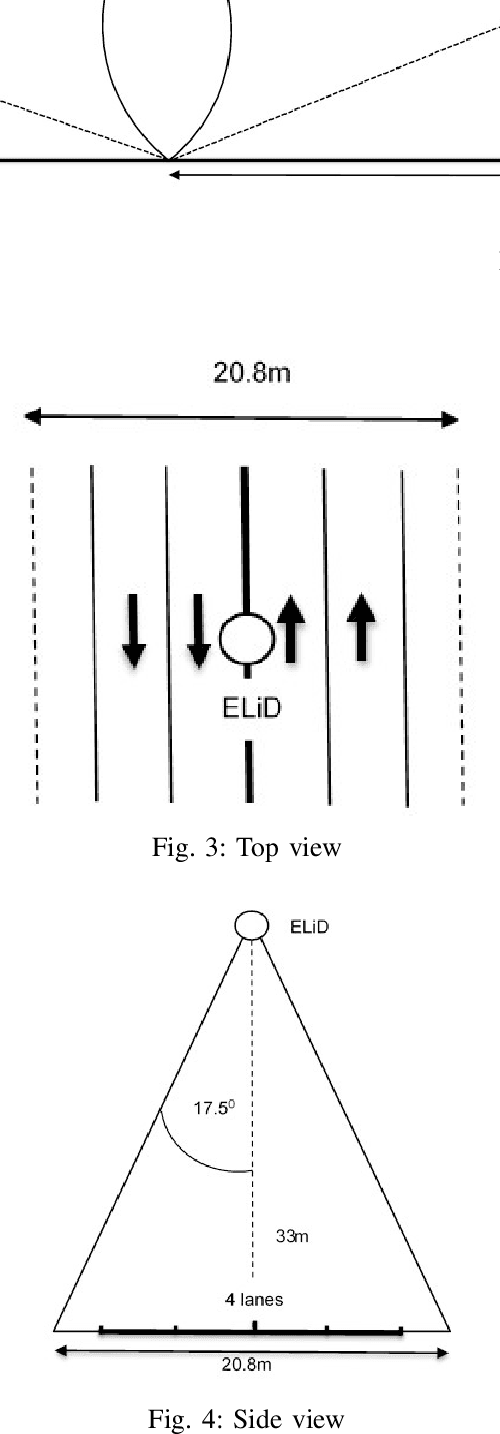
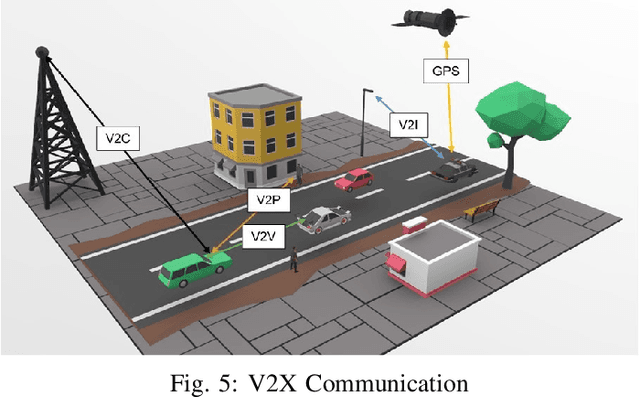
The current autonomous driving architecture places a heavy burden in signal processing for the graphics processing units (GPUs) in the car. This directly translates into battery drain and lower energy efficiency, crucial factors in electric vehicles. This is due to the high bit rate of the captured video and other sensing inputs, mainly due to Light Detection and Ranging (LiDAR) sensor at the top of the car which is an essential feature in autonomous vehicles. LiDAR is needed to obtain a high precision map for the vehicle AI to make relevant decisions. However, this is still a quite restricted view from the car. This is the same even in the case of cars without a LiDAR such as Tesla. The existing LiDARs and the cameras have limited horizontal and vertical fields of visions. In all cases it can be argued that precision is lower, given the smaller map generated. This also results in the accumulation of a large amount of data in the order of several TBs in a day, the storage of which becomes challenging. If we are to reduce the effort for the processing units inside the car, we need to uplink the data to edge or an appropriately placed cloud. However, the required data rates in the order of several Gbps are difficult to be met even with the advent of 5G. Therefore, we propose to have a coordinated set of LiDAR's outside at an elevation which can provide an integrated view with a much larger field of vision (FoV) to a centralized decision making body which then sends the required control actions to the vehicles with a lower bit rate in the downlink and with the required latency. The calculations we have based on industry standard equipment from several manufacturers show that this is not just a concept but a feasible system which can be implemented.The proposed system can play a supportive role with existing autonomous vehicle architecture and it is easily applicable in an urban area.