 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAgentic Physical-AI for Self-Aware RF Systems
Mar 21, 2026Intelligent control of RF transceivers adapting to dynamic operational conditions is essential in the modern and future communication systems. We propose a multi-agent neurosymbolic AI system, where AI agents are assigned for circuit components. Agents have an internal model and a corresponding control algorithm as its constituents. Modeling of the IF amplifier shows promising results, where the same approach can be extended to all the components, thus creating a fully intelligent RF system.
6G Resilience -- White Paper
Sep 10, 2025
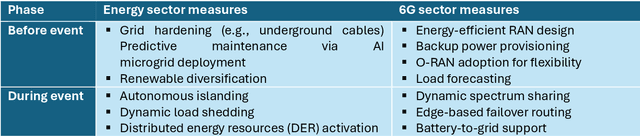


6G must be designed to withstand, adapt to, and evolve amid prolonged, complex disruptions. Mobile networks' shift from efficiency-first to sustainability-aware has motivated this white paper to assert that resilience is a primary design goal, alongside sustainability and efficiency, encompassing technology, architecture, and economics. We promote resilience by analysing dependencies between mobile networks and other critical systems, such as energy, transport, and emergency services, and illustrate how cascading failures spread through infrastructures. We formalise resilience using the 3R framework: reliability, robustness, resilience. Subsequently, we translate this into measurable capabilities: graceful degradation, situational awareness, rapid reconfiguration, and learning-driven improvement and recovery. Architecturally, we promote edge-native and locality-aware designs, open interfaces, and programmability to enable islanded operations, fallback modes, and multi-layer diversity (radio, compute, energy, timing). Key enablers include AI-native control loops with verifiable behaviour, zero-trust security rooted in hardware and supply-chain integrity, and networking techniques that prioritise critical traffic, time-sensitive flows, and inter-domain coordination. Resilience also has a techno-economic aspect: open platforms and high-quality complementors generate ecosystem externalities that enhance resilience while opening new markets. We identify nine business-model groups and several patterns aligned with the 3R objectives, and we outline governance and standardisation. This white paper serves as an initial step and catalyst for 6G resilience. It aims to inspire researchers, professionals, government officials, and the public, providing them with the essential components to understand and shape the development of 6G resilience.
Constellation Shaping under Phase Noise Impairment for Sub-THz Communications
Nov 21, 2023The large untapped spectrum in the sub-THz allows for ultra-high throughput communication to realize many seemingly impossible applications in 6G. One of the challenges in radio communications in sub-THz is the hardware impairments. Specifically, phase noise is one key hardware impairment, which is accentuated as we increase the frequency and bandwidth. Furthermore, the modest output power of the sub-THz power amplifier demands limits on peak to average power ratio (PAPR) signal design. Single carrier frequency domain equalization (SC-FDE) waveform has been identified as a suitable candidate for sub-THz, although some challenges such as phase noise and PAPR still remain to be tackled. In this work, we design a phase noise robust, low PAPR SC-FDE waveform by geometrically shaping the constellation under practical conditions. We formulate the waveform optimization problem in its augmented Lagrangian form and use a back-propagation-inspired technique to obtain a constellation design that is numerically robust to phase noise, while maintaining a low PAPR.
LiDAR Aided Human Blockage Prediction for 6G
Oct 01, 2021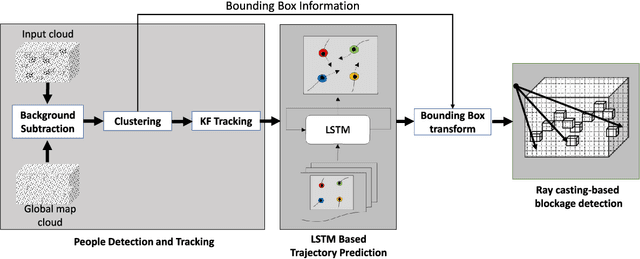
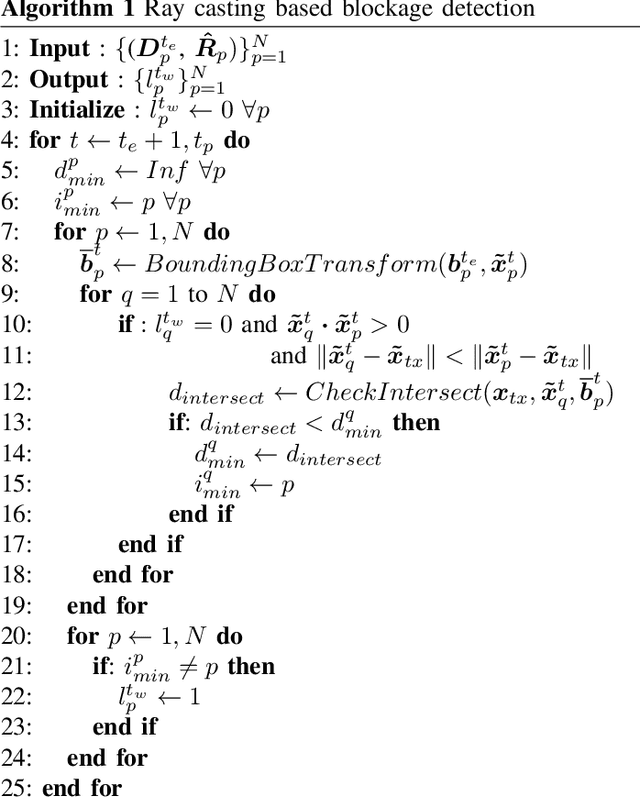
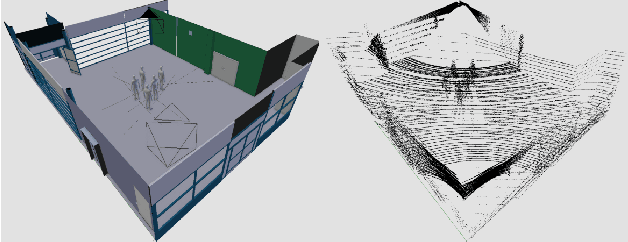
Leveraging higher frequencies up to THz band paves the way towards a faster network in the next generation of wireless communications. However, such shorter wavelengths are susceptible to higher scattering and path loss forcing the link to depend predominantly on the line-of-sight (LOS) path. Dynamic movement of humans has been identified as a major source of blockages to such LOS links. In this work, we aim to overcome this challenge by predicting human blockages to the LOS link enabling the transmitter to anticipate the blockage and act intelligently. We propose an end-to-end system of infrastructure-mounted LiDAR sensors to capture the dynamics of the communication environment visually, process the data with deep learning and ray casting techniques to predict future blockages. Experiments indicate that the system achieves an accuracy of 87% predicting the upcoming blockages while maintaining a precision of 78% and a recall of 79% for a window of 300 ms.
Elevated LiDAR based Sensing for 6G -- 3D Maps with cm Level Accuracy
Feb 22, 2021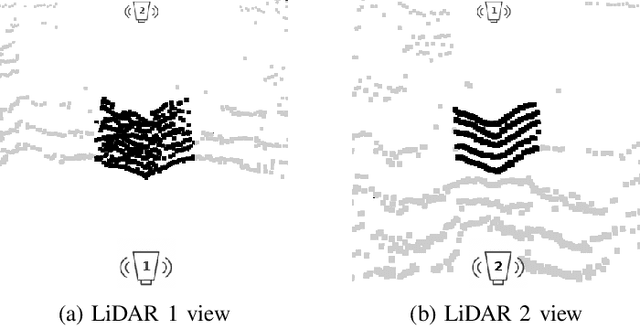
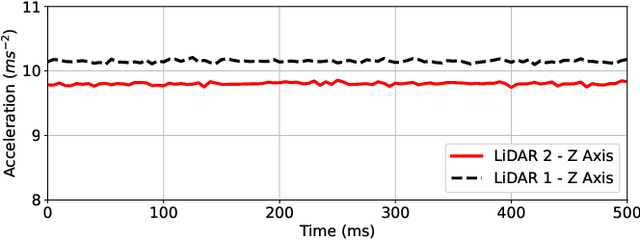
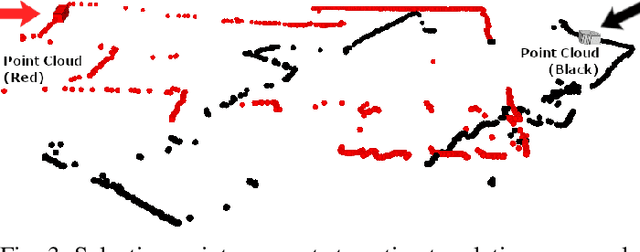
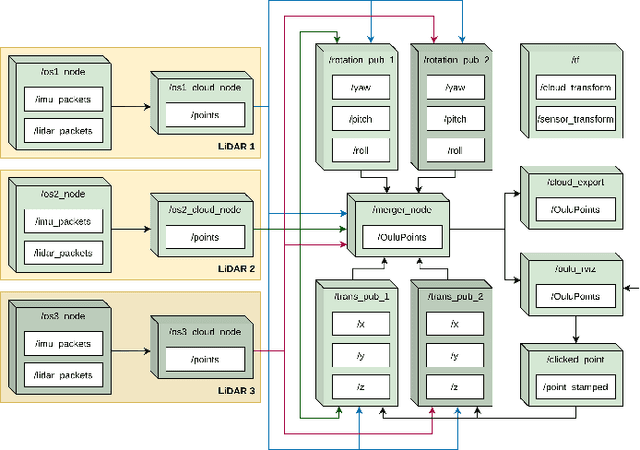
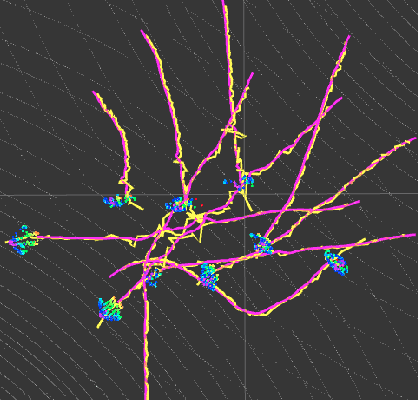
One key vertical application that will be enabled by 6G is the automation of the processes with the increased use of robots. As a result, sensing and localization of the surrounding environment becomes a crucial factor for these robots to operate. Light detection and ranging (LiDAR) has emerged as an appropriate method of sensing due to its capability of generating detail-rich information with high accuracy. However, LiDARs are power hungry devices that generate a lot of data, and these characteristics limit their use as on-board sensors in robots. In this paper, we present a novel approach on the methodology of generating an enhanced 3D map with improved field-of-view using multiple LiDAR sensors. We utilize an inherent property of LiDAR point clouds; rings and data from the inertial measurement unit (IMU) embedded in the sensor for registration of the point clouds. The generated 3D map has an accuracy of 10 cm when compared to the real-world measurements. We also carry out the practical implementation of the proposed method using two LiDAR sensors. Furthermore, we develop an application to utilize the generated map where a robot navigates through the mapped environment with minimal support from the sensors on-board. The LiDARs are fixed in the infrastructure at elevated positions. Thus this is applicable to vehicular and factory scenarios. Our results further validate the idea of using multiple elevated LiDARs as a part of the infrastructure for various applications.