 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive Sensing with Predictive Coding and Uncertainty Minimization
Jul 04, 2023We present an end-to-end procedure for embodied exploration based on two biologically inspired computations: predictive coding and uncertainty minimization. The procedure can be applied to any exploration setting in a task-independent and intrinsically driven manner. We first demonstrate our approach in a maze navigation task and show that our model is capable of discovering the underlying transition distribution and reconstructing the spatial features of the environment. Second, we apply our model to the more complex task of active vision, where an agent must actively sample its visual environment to gather information. We show that our model is able to build unsupervised representations that allow it to actively sample and efficiently categorize sensory scenes. We further show that using these representations as input for downstream classification leads to superior data efficiency and learning speed compared to other baselines, while also maintaining lower parameter complexity. Finally, the modularity of our model allows us to analyze its internal mechanisms and to draw insight into the interactions between perception and action during exploratory behavior.
Neuromorphic Nearest-Neighbor Search Using Intel's Pohoiki Springs
Apr 27, 2020
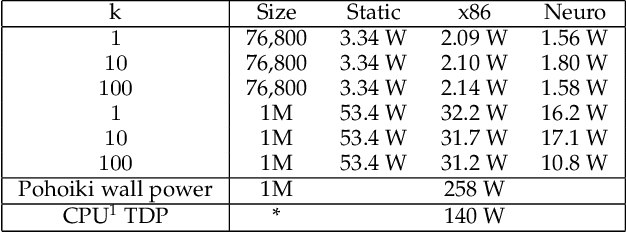
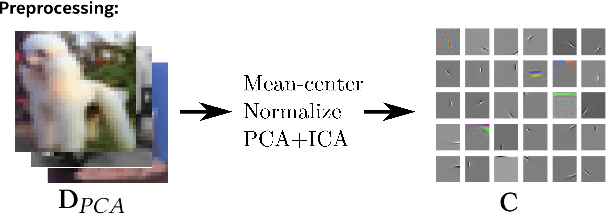
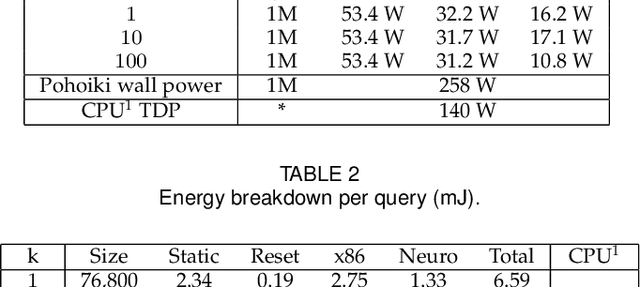
Neuromorphic computing applies insights from neuroscience to uncover innovations in computing technology. In the brain, billions of interconnected neurons perform rapid computations at extremely low energy levels by leveraging properties that are foreign to conventional computing systems, such as temporal spiking codes and finely parallelized processing units integrating both memory and computation. Here, we showcase the Pohoiki Springs neuromorphic system, a mesh of 768 interconnected Loihi chips that collectively implement 100 million spiking neurons in silicon. We demonstrate a scalable approximate k-nearest neighbor (k-NN) algorithm for searching large databases that exploits neuromorphic principles. Compared to state-of-the-art conventional CPU-based implementations, we achieve superior latency, index build time, and energy efficiency when evaluated on several standard datasets containing over 1 million high-dimensional patterns. Further, the system supports adding new data points to the indexed database online in O(1) time unlike all but brute force conventional k-NN implementations.
Rapid online learning and robust recall in a neuromorphic olfactory circuit
Jun 17, 2019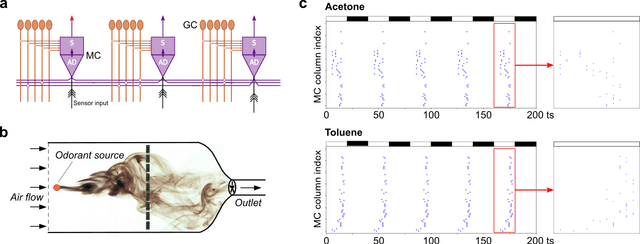
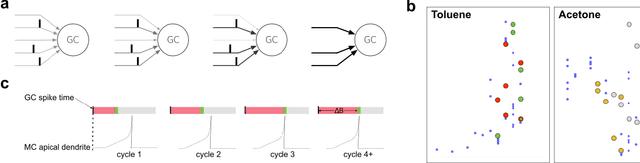
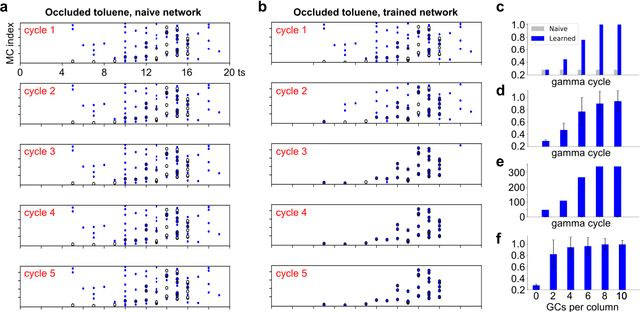
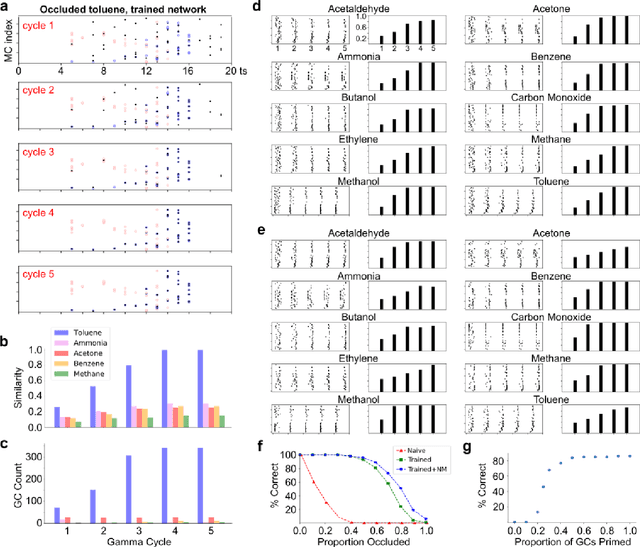
The mammalian olfactory system learns new odors rapidly, exhibits negligible interference among odor memories, and identifies known odors under challenging conditions. The mechanisms by which it does so are unknown. We here present a general theory for odor learning and identification under noise in the olfactory system, and demonstrate its efficacy using a neuromorphic model of the olfactory bulb. As with biological olfaction, the spike timing-based algorithm utilizes distributed, event-driven computations and rapid online learning. Localized spike timing-dependent plasticity rules are employed iteratively over sequential gamma-frequency packets to construct odor representations from the activity of chemosensor arrays mounted in a wind tunnel. Learned odors then are reliably identified despite strong destructive interference. Noise resistance is enhanced by neuromodulation and contextual priming. Lifelong learning capabilities are enabled by adult neurogenesis. The algorithm is applicable to any signal identification problem in which high-dimensional signals are embedded in unknown backgrounds.