 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRECLAIM: Cyclic Causal Discovery Amid Measurement Noise
Mar 21, 2026Uncovering causal relationships is a fundamental problem across science and engineering. However, most existing causal discovery methods assume acyclicity and direct access to the system variables -- assumptions that fail to hold in many real-world settings. For instance, in genomics, cyclic regulatory networks are common, and measurements are often corrupted by instrumental noise. To address these challenges, we propose RECLAIM, a causal discovery framework that natively handles both cycles and measurement noise. RECLAIM learns the causal graph structure by maximizing the likelihood of the observed measurements via expectation-maximization (EM), using residual normalizing flows for tractable likelihood computation. We consider two measurement models: (i) Gaussian additive noise, and (ii) a linear measurement system with additive Gaussian noise. We provide theoretical consistency guarantees for both the settings. Experiments on synthetic data and real-world protein signaling datasets demonstrate the efficacy of the proposed method.
Differentiable Cyclic Causal Discovery Under Unmeasured Confounders
Aug 11, 2025



Understanding causal relationships between variables is fundamental across scientific disciplines. Most causal discovery algorithms rely on two key assumptions: (i) all variables are observed, and (ii) the underlying causal graph is acyclic. While these assumptions simplify theoretical analysis, they are often violated in real-world systems, such as biological networks. Existing methods that account for confounders either assume linearity or struggle with scalability. To address these limitations, we propose DCCD-CONF, a novel framework for differentiable learning of nonlinear cyclic causal graphs in the presence of unmeasured confounders using interventional data. Our approach alternates between optimizing the graph structure and estimating the confounder distribution by maximizing the log-likelihood of the data. Through experiments on synthetic data and real-world gene perturbation datasets, we show that DCCD-CONF outperforms state-of-the-art methods in both causal graph recovery and confounder identification. Additionally, we also provide consistency guarantees for our framework, reinforcing its theoretical soundness.
MissNODAG: Differentiable Cyclic Causal Graph Learning from Incomplete Data
Oct 24, 2024



Causal discovery in real-world systems, such as biological networks, is often complicated by feedback loops and incomplete data. Standard algorithms, which assume acyclic structures or fully observed data, struggle with these challenges. To address this gap, we propose MissNODAG, a differentiable framework for learning both the underlying cyclic causal graph and the missingness mechanism from partially observed data, including data missing not at random. Our framework integrates an additive noise model with an expectation-maximization procedure, alternating between imputing missing values and optimizing the observed data likelihood, to uncover both the cyclic structures and the missingness mechanism. We demonstrate the effectiveness of MissNODAG through synthetic experiments and an application to real-world gene perturbation data.
Learning Cyclic Causal Models from Incomplete Data
Feb 23, 2024Causal learning is a fundamental problem in statistics and science, offering insights into predicting the effects of unseen treatments on a system. Despite recent advances in this topic, most existing causal discovery algorithms operate under two key assumptions: (i) the underlying graph is acyclic, and (ii) the available data is complete. These assumptions can be problematic as many real-world systems contain feedback loops (e.g., biological systems), and practical scenarios frequently involve missing data. In this work, we propose a novel framework, named MissNODAGS, for learning cyclic causal graphs from partially missing data. Under the additive noise model, MissNODAGS learns the causal graph by alternating between imputing the missing data and maximizing the expected log-likelihood of the visible part of the data in each training step, following the principles of the expectation-maximization (EM) framework. Through synthetic experiments and real-world single-cell perturbation data, we demonstrate improved performance when compared to using state-of-the-art imputation techniques followed by causal learning on partially missing interventional data.
NODAGS-Flow: Nonlinear Cyclic Causal Structure Learning
Jan 04, 2023Learning causal relationships between variables is a well-studied problem in statistics, with many important applications in science. However, modeling real-world systems remain challenging, as most existing algorithms assume that the underlying causal graph is acyclic. While this is a convenient framework for developing theoretical developments about causal reasoning and inference, the underlying modeling assumption is likely to be violated in real systems, because feedback loops are common (e.g., in biological systems). Although a few methods search for cyclic causal models, they usually rely on some form of linearity, which is also limiting, or lack a clear underlying probabilistic model. In this work, we propose a novel framework for learning nonlinear cyclic causal graphical models from interventional data, called NODAGS-Flow. We perform inference via direct likelihood optimization, employing techniques from residual normalizing flows for likelihood estimation. Through synthetic experiments and an application to single-cell high-content perturbation screening data, we show significant performance improvements with our approach compared to state-of-the-art methods with respect to structure recovery and predictive performance.
Design of Compressed Sensing Systems via Density-Evolution Framework for Structure Recovery in Graphical Models
Mar 17, 2022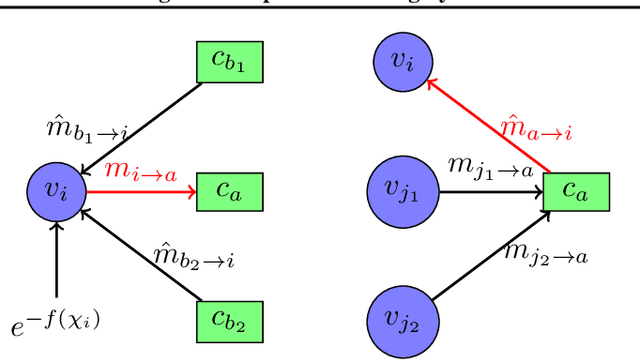
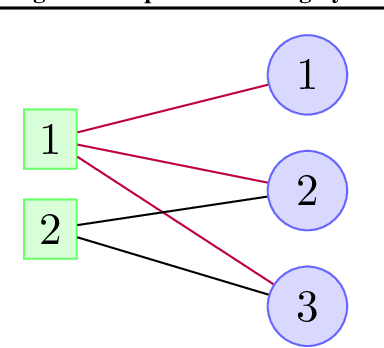
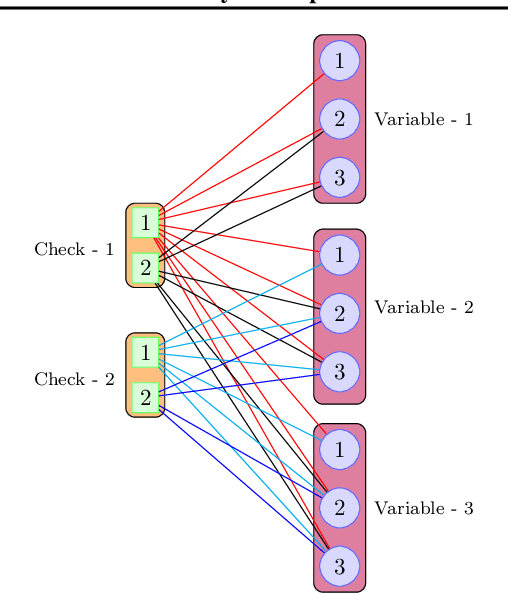
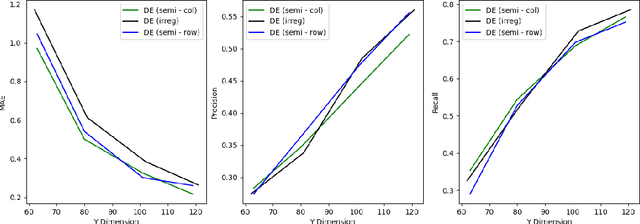
It has been shown that the task of learning the structure of Bayesian networks (BN) from observational data is an NP-Hard problem. Although there have been attempts made to tackle this problem, these solutions assume direct access to the observational data which may not be practical in certain applications. In this paper, we explore the feasibility of recovering the structure of Gaussian Bayesian Network (GBN) from compressed (low dimensional and indirect) measurements. We propose a novel density-evolution based framework for optimizing compressed linear measurement systems that would, by design, allow for more accurate retrieval of the covariance matrix and thereby the graph structure. In particular, under the assumption that both the covariance matrix and the graph are sparse, we show that the structure of GBN can indeed be recovered from resulting compressed measurements. The numerical simulations show that our sensing systems outperform the state of the art with respect to Maximum absolute error (MAE) and have comparable performance with respect to precision and recall, without any need for ad-hoc parameter tuning.
Visual Question Answering based on Formal Logic
Nov 08, 2021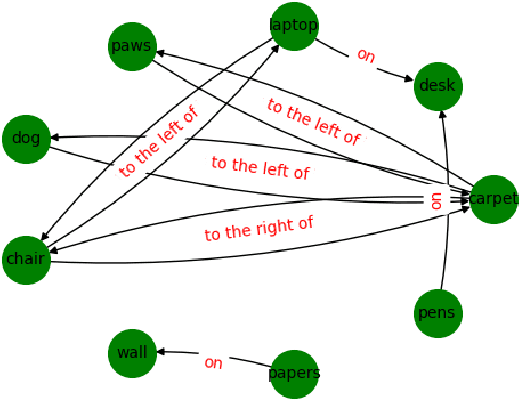

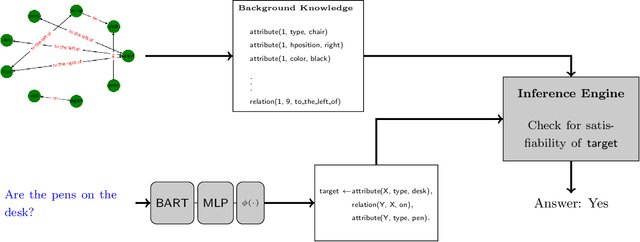
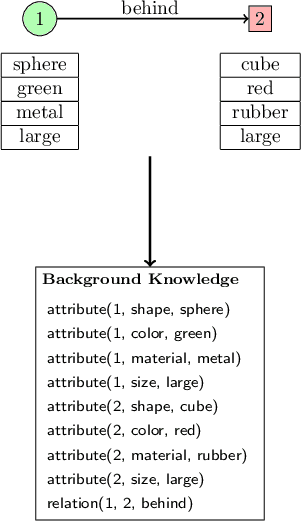
Visual question answering (VQA) has been gaining a lot of traction in the machine learning community in the recent years due to the challenges posed in understanding information coming from multiple modalities (i.e., images, language). In VQA, a series of questions are posed based on a set of images and the task at hand is to arrive at the answer. To achieve this, we take a symbolic reasoning based approach using the framework of formal logic. The image and the questions are converted into symbolic representations on which explicit reasoning is performed. We propose a formal logic framework where (i) images are converted to logical background facts with the help of scene graphs, (ii) the questions are translated to first-order predicate logic clauses using a transformer based deep learning model, and (iii) perform satisfiability checks, by using the background knowledge and the grounding of predicate clauses, to obtain the answer. Our proposed method is highly interpretable and each step in the pipeline can be easily analyzed by a human. We validate our approach on the CLEVR and the GQA dataset. We achieve near perfect accuracy of 99.6% on the CLEVR dataset comparable to the state of art models, showcasing that formal logic is a viable tool to tackle visual question answering. Our model is also data efficient, achieving 99.1% accuracy on CLEVR dataset when trained on just 10% of the training data.