 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModeling Evacuee Behavior for Robot-Guided Emergency Evacuation
Sep 26, 2023This paper considers the problem of developing suitable behavior models of human evacuees during a robot-guided emergency evacuation. We describe our recent research developing behavior models of evacuees and potential future uses of these models. This paper considers how behavior models can contribute to the development and design of emergency evacuation simulations in order to improve social navigation during an evacuation.
Near Real-Time Position Tracking for Robot-Guided Evacuation
Sep 26, 2023During the evacuation of a building, the rapid and accurate tracking of human evacuees can be used by a guide robot to increase the effectiveness of the evacuation [1],[2]. This paper introduces a near real-time human position tracking solution tailored for evacuation robots. Using a pose detector, our system first identifies human joints in the camera frame in near real-time and then translates the position of these pixels into real-world coordinates via a simple calibration process. We run multiple trials of the system in action in an indoor lab environment and show that the system can achieve an accuracy of 0.55 meters when compared to ground truth. The system can also achieve an average of 3 frames per second (FPS) which was sufficient for our study on robot-guided human evacuation. The potential of our approach extends beyond mere tracking, paving the way for evacuee motion prediction, allowing the robot to proactively respond to human movements during an evacuation.
Learning Evacuee Models from Robot-Guided Emergency Evacuation Experiments
Jun 30, 2023Recent research has examined the possibility of using robots to guide evacuees to safe exits during emergencies. Yet, there are many factors that can impact a person's decision to follow a robot. Being able to model how an evacuee follows an emergency robot guide could be crucial for designing robots that effectively guide evacuees during an emergency. This paper presents a method for developing realistic and predictive human evacuee models from physical human evacuation experiments. The paper analyzes the behavior of 14 human subjects during physical robot-guided evacuation. We then use the video data to create evacuee motion models that predict the person's future positions during the emergency. Finally, we validate the resulting models by running a k-fold cross-validation on the data collected during physical human subject experiments. We also present performance results of the model using data from a similar simulated emergency evacuation experiment demonstrating that these models can serve as a tool to predict evacuee behavior in novel evacuation simulations.
Multi-Robot-Guided Crowd Evacuation: Two-Scale Modeling and Control Based on Mean-Field Hydrodynamic Models
Feb 28, 2023Emergency evacuation describes a complex situation involving time-critical decision-making by evacuees. Mobile robots are being actively explored as a potential solution to provide timely guidance. In this work, we study a robot-guided crowd evacuation problem where a small group of robots is used to guide a large human crowd to safe locations. The challenge lies in how to utilize micro-level human-robot interactions to indirectly influence a population that significantly outnumbers the robots to achieve the collective evacuation objective. To address the challenge, we follow a two-scale modeling strategy and explore mean-field hydrodynamic models which consist of a family of microscopic social-force models that explicitly describe how human movements are locally affected by other humans, the environment, and the robots, and associated macroscopic equations for the temporal and spatial evolution of the crowd density and flow velocity. We design controllers for the robots such that they not only automatically explore the environment (with unknown dynamic obstacles) to cover it as much as possible but also dynamically adjust the directions of their local navigation force fields based on the real-time macro-states of the crowd to guide the crowd to a safe location. We prove the stability of the proposed evacuation algorithm and conduct a series of simulations (involving unknown dynamic obstacles) to validate the performance of the algorithm.
Multi-Robot-Assisted Human Crowd Evacuation using Navigation Velocity Fields
Sep 20, 2022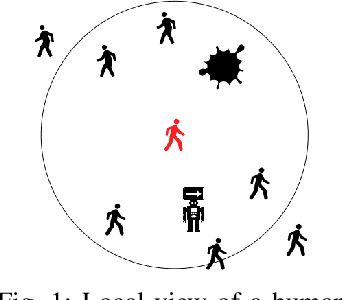
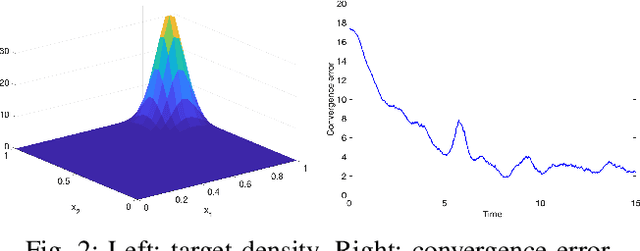
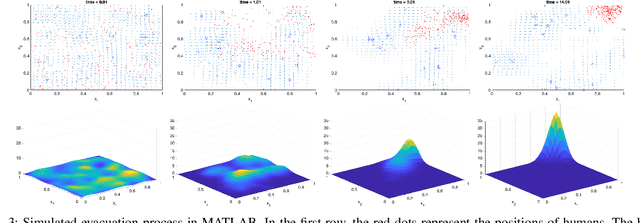
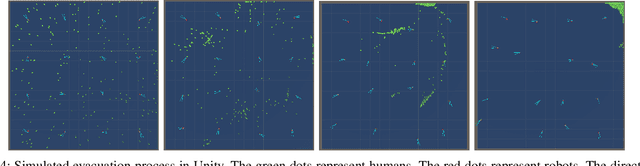
This work studies a robot-assisted crowd evacuation problem where we control a small group of robots to guide a large human crowd to safe locations. The challenge lies in how to model human-robot interactions and design robot controls to indirectly control a human population that significantly outnumbers the robots. To address the challenge, we treat the crowd as a continuum and formulate the evacuation objective as driving the crowd density to target locations. We propose a novel mean-field model which consists of a family of microscopic equations that explicitly model how human motions are locally guided by the robots and an associated macroscopic equation that describes how the crowd density is controlled by the navigation velocity fields generated by all robots. Then, we design density feedback controllers for the robots to dynamically adjust their states such that the generated navigation velocity fields drive the crowd density to a target density. Stability guarantees of the proposed controllers are proven. Agent-based simulations are included to evaluate the proposed evacuation algorithms.