 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNear Real-Time Position Tracking for Robot-Guided Evacuation
Sep 26, 2023During the evacuation of a building, the rapid and accurate tracking of human evacuees can be used by a guide robot to increase the effectiveness of the evacuation [1],[2]. This paper introduces a near real-time human position tracking solution tailored for evacuation robots. Using a pose detector, our system first identifies human joints in the camera frame in near real-time and then translates the position of these pixels into real-world coordinates via a simple calibration process. We run multiple trials of the system in action in an indoor lab environment and show that the system can achieve an accuracy of 0.55 meters when compared to ground truth. The system can also achieve an average of 3 frames per second (FPS) which was sufficient for our study on robot-guided human evacuation. The potential of our approach extends beyond mere tracking, paving the way for evacuee motion prediction, allowing the robot to proactively respond to human movements during an evacuation.
Modeling Evacuee Behavior for Robot-Guided Emergency Evacuation
Sep 26, 2023This paper considers the problem of developing suitable behavior models of human evacuees during a robot-guided emergency evacuation. We describe our recent research developing behavior models of evacuees and potential future uses of these models. This paper considers how behavior models can contribute to the development and design of emergency evacuation simulations in order to improve social navigation during an evacuation.
Brain-Inspired Model for Incremental Learning Using a Few Examples
Feb 27, 2020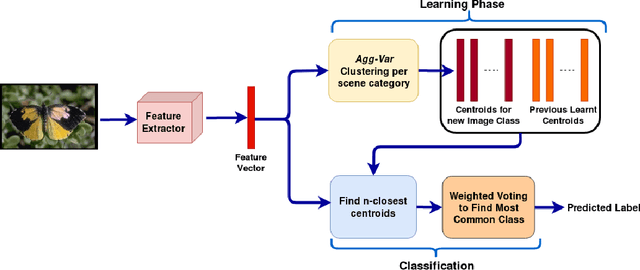
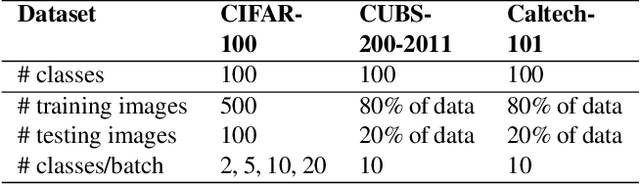
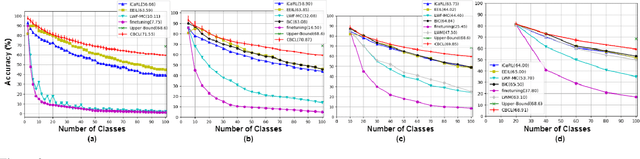
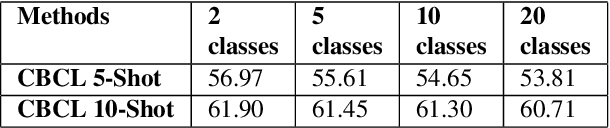
Incremental learning attempts to develop a classifier which learns continuously from a stream of data segregated into different classes. Deep learning approaches suffer from catastrophic forgetting when learning classes incrementally. We propose a novel approach to incremental learning inspired by the concept learning model of the hippocampus that represents each image class as centroids and does not suffer from catastrophic forgetting. Classification of a test image is accomplished using the distance of the test image to the n closest centroids. We further demonstrate that our approach can incrementally learn from only a few examples per class. Evaluations of our approach on three class-incremental learning benchmarks: Caltech-101, CUBS-200-2011 and CIFAR-100 for incremental and few-shot incremental learning depict state-of-the-art results in terms of classification accuracy over all learned classes.
A Robot that Learns Connect Four Using Game Theory and Demonstrations
Jan 03, 2020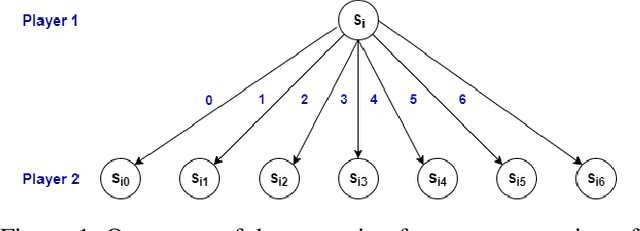
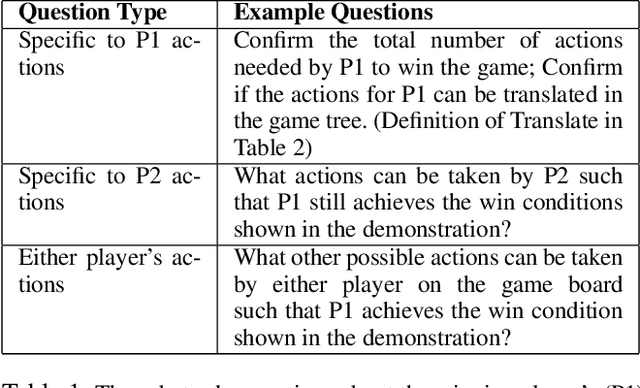
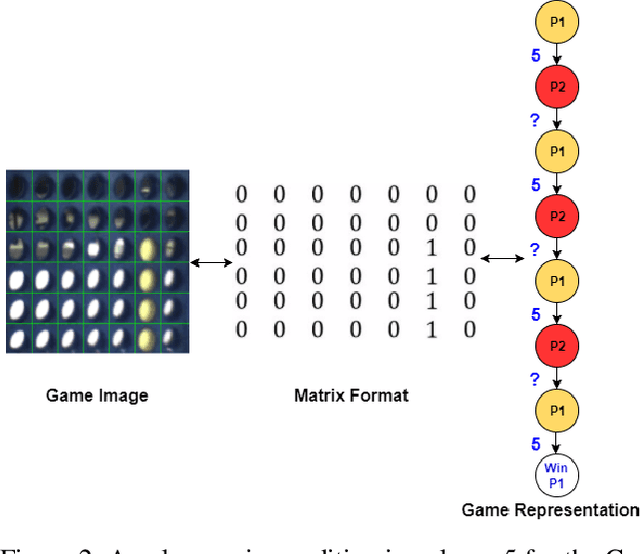
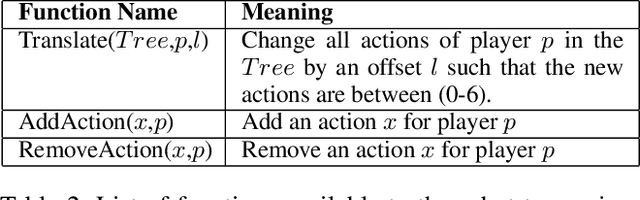
Teaching robots new skills using minimal time and effort has long been a goal of artificial intelligence. This paper investigates the use of game theoretic representations to represent and learn how to play interactive games such as Connect Four. We combine aspects of learning by demonstration, active learning, and game theory allowing a robot to learn by presenting its understanding of the structure of the game and conducting a question/answer session with a person. The paper demonstrates how a robot can be taught the win conditions of the game Connect Four and its variants using a single demonstration and a few trial examples with a question and answer session led by the robot. Our results show that the robot can learn any arbitrary win conditions for the Connect Four game without any prior knowledge of the win conditions and then play the game with a human utilizing the learned win conditions. Our experiments also show that some questions are more important for learning the game's win conditions.
Centroid-Based Scene Classification (CBSC): Using Deep Features and Clustering for RGB-D Indoor Scene Classification
Nov 01, 2019
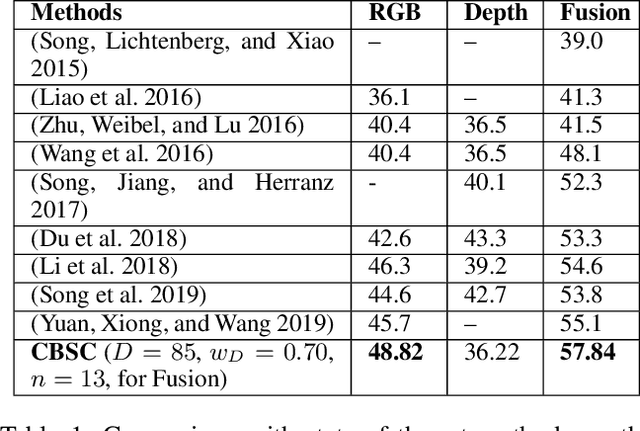
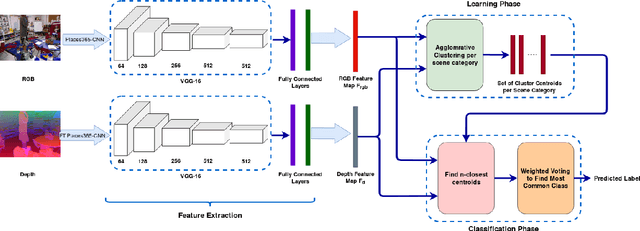
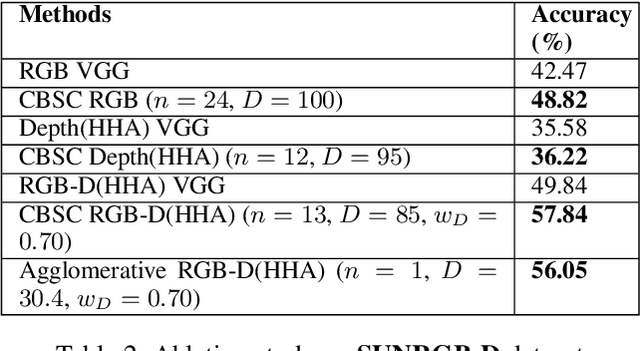
This paper contributes a novel method for RGB-D indoor scene classification. Recent approaches to this problem focus on developing increasingly complex pipelines that learn correlated features across the RGB and depth modalities. In contrast, this paper presents a simple method that first extracts features for the RGB and depth modalities using Places365-CNN and fine-tuned Places365-CNN on depth data, respectively and then clusters these features to generate a set of centroids representing each scene category from the training data. For classification a scene image is converted to CNN features and the distance of these features to the n closest learned centroids is used to predict the image's category. We evaluate our method on two standard RGB-D indoor scene classification benchmarks: SUNRGB-D and NYU Depth V2 and demonstrate that our proposed classification approach achieves superior performance over the state-of-the-art methods on both datasets.