 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCross-subject Brain Functional Connectivity Analysis for Multi-task Cognitive State Evaluation
Aug 27, 2024



Cognition refers to the function of information perception and processing, which is the fundamental psychological essence of human beings. It is responsible for reasoning and decision-making, while its evaluation is significant for the aviation domain in mitigating potential safety risks. Existing studies tend to use varied methods for cognitive state evaluation yet have limitations in timeliness, generalisation, and interpretability. Accordingly, this study adopts brain functional connectivity with electroencephalography signals to capture associations in brain regions across multiple subjects for evaluating real-time cognitive states. Specifically, a virtual reality-based flight platform is constructed with multi-screen embedded. Three distinctive cognitive tasks are designed and each has three degrees of difficulty. Thirty subjects are acquired for analysis and evaluation. The results are interpreted through different perspectives, including inner-subject and cross-subject for task-wise and gender-wise underlying brain functional connectivity. Additionally, this study incorporates questionnaire-based, task performance-based, and physiological measure-based approaches to fairly label the trials. A multi-class cognitive state evaluation is further conducted with the active brain connections. Benchmarking results demonstrate that the identified brain regions have considerable influences in cognition, with a multi-class accuracy rate of 95.83% surpassing existing studies. The derived findings bring significance to understanding the dynamic relationships among human brain functional regions, cross-subject cognitive behaviours, and decision-making, which have promising practical application values.
Partial Computing Offloading Assisted Cloud Point Registration in Multi-robot SLAM
May 30, 2019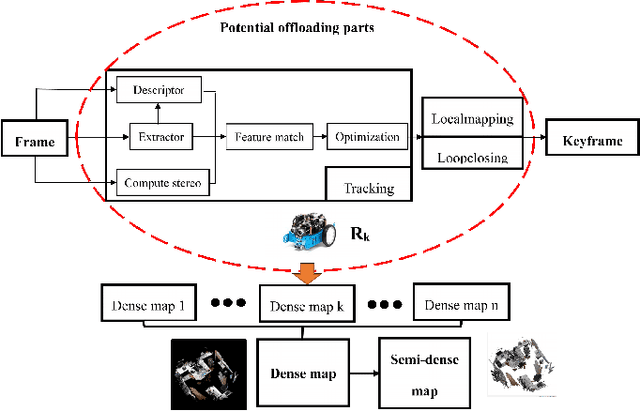
Multi-robot visual simultaneous localization and mapping (SLAM) system is normally consisted of multiple mobile robots equipped with camera and/or other visual sensors. The networked robots work independently or cooperatively in an unknown scene in order to solve autonomous localization and mapping problem. One of the most critical issues in Multi-robot visual SLAM is the intensive computation that is normally required yet overwhelming for inexpensive mobile robots with limited on-board resources. To address this problem, a novel task offloading strategy and dense point cloud map construction method is proposed in this paper. First, we develop a novel strategy to remotely offload computation-intensive tasks to cloud center, so that the tasks that could not originally be achieved locally on the resource-limited robot systems become possible. Second, a modified iterative closest point algorithm (ICP), named fitness score hierarchical ICP algorithm (FS-HICP), is developed to accelerate point cloud registration. The correctness, efficiency, and scalability of the proposed strategy are evaluated with both theoretical analysis and experimental simulations. The results show that the proposed method can effectively reduce the energy consumption while increase the computation capability and speed of the multi-robot visual SLAM system, especially in indoor environment.