 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStereo CenterNet based 3D Object Detection for Autonomous Driving
Mar 20, 2021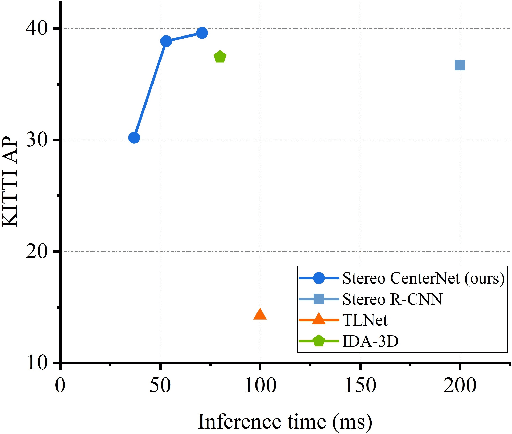
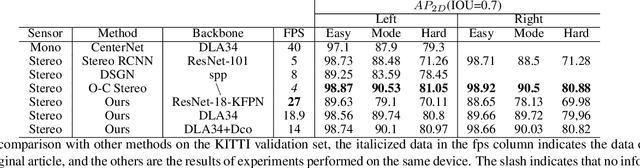
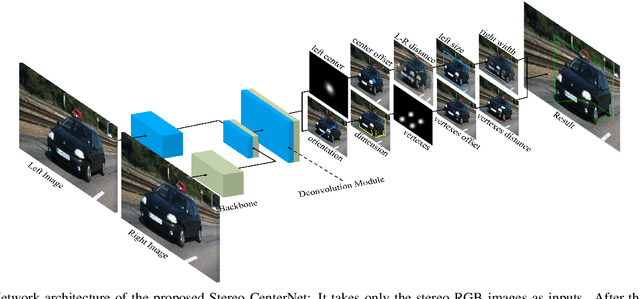
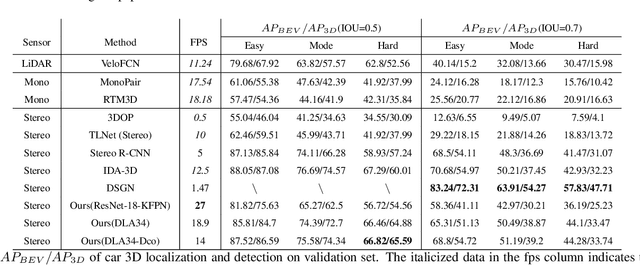
In recent years, 3D detection based on stereo cameras has made great progress, but most state-of-the-art methods use anchor-based 2D detection or depth estimation to solve this problem. However, the high computational cost makes these methods difficult to meet real-time performance. In this work, we propose a 3D object detection method using geometric information in stereo images, called Stereo CenterNet. Stereo CenterNet predicts the four semantic key points of the 3D bounding box of the object in space and uses 2D left right boxes, 3D dimension, orientation and key points to restore the bounding box of the object in the 3D space. Then, we use an improved photometric alignment module to further optimize the position of the 3D bounding box. Experiments conducted on the KITTI dataset show that our method achieves the best speed-accuracy trade-off compared with the state-of-the-art methods based on stereo geometry.
Partial Computing Offloading Assisted Cloud Point Registration in Multi-robot SLAM
May 30, 2019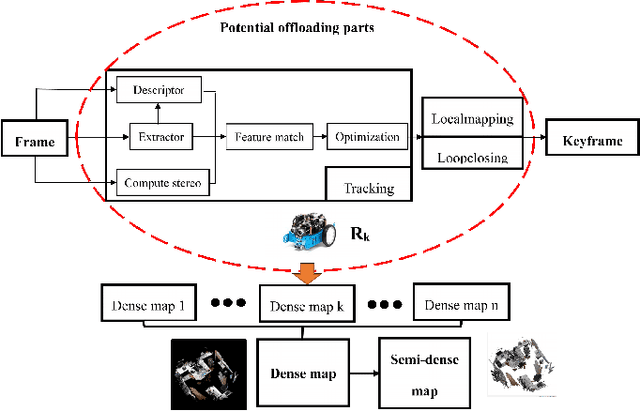
Multi-robot visual simultaneous localization and mapping (SLAM) system is normally consisted of multiple mobile robots equipped with camera and/or other visual sensors. The networked robots work independently or cooperatively in an unknown scene in order to solve autonomous localization and mapping problem. One of the most critical issues in Multi-robot visual SLAM is the intensive computation that is normally required yet overwhelming for inexpensive mobile robots with limited on-board resources. To address this problem, a novel task offloading strategy and dense point cloud map construction method is proposed in this paper. First, we develop a novel strategy to remotely offload computation-intensive tasks to cloud center, so that the tasks that could not originally be achieved locally on the resource-limited robot systems become possible. Second, a modified iterative closest point algorithm (ICP), named fitness score hierarchical ICP algorithm (FS-HICP), is developed to accelerate point cloud registration. The correctness, efficiency, and scalability of the proposed strategy are evaluated with both theoretical analysis and experimental simulations. The results show that the proposed method can effectively reduce the energy consumption while increase the computation capability and speed of the multi-robot visual SLAM system, especially in indoor environment.