 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3DCoMPaT$^{++}$: An improved Large-scale 3D Vision Dataset for Compositional Recognition
Oct 27, 2023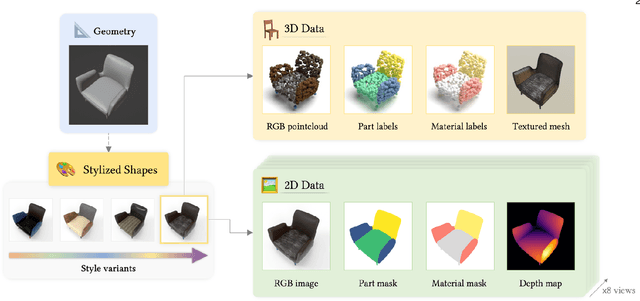
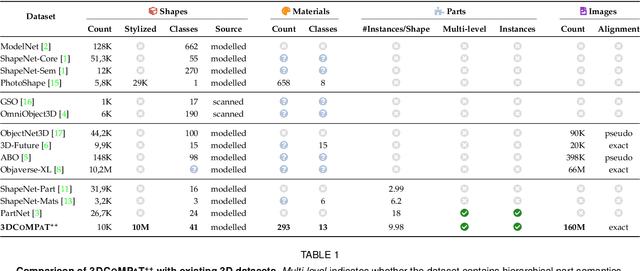
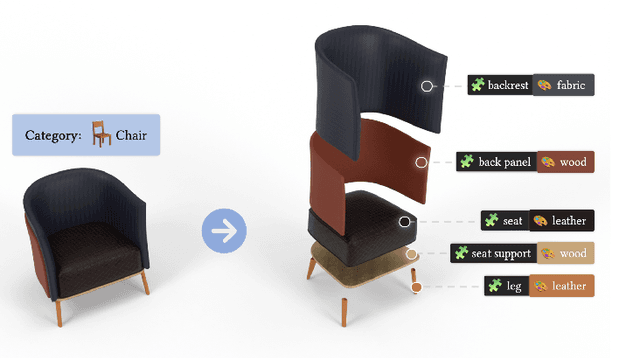
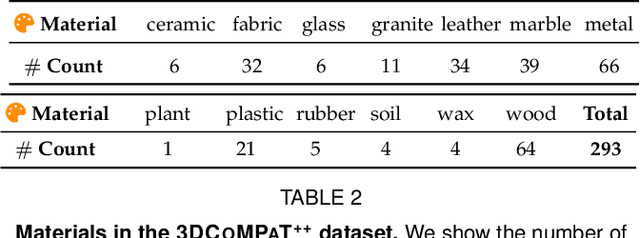
In this work, we present 3DCoMPaT$^{++}$, a multimodal 2D/3D dataset with 160 million rendered views of more than 10 million stylized 3D shapes carefully annotated at the part-instance level, alongside matching RGB point clouds, 3D textured meshes, depth maps, and segmentation masks. 3DCoMPaT$^{++}$ covers 41 shape categories, 275 fine-grained part categories, and 293 fine-grained material classes that can be compositionally applied to parts of 3D objects. We render a subset of one million stylized shapes from four equally spaced views as well as four randomized views, leading to a total of 160 million renderings. Parts are segmented at the instance level, with coarse-grained and fine-grained semantic levels. We introduce a new task, called Grounded CoMPaT Recognition (GCR), to collectively recognize and ground compositions of materials on parts of 3D objects. Additionally, we report the outcomes of a data challenge organized at CVPR2023, showcasing the winning method's utilization of a modified PointNet$^{++}$ model trained on 6D inputs, and exploring alternative techniques for GCR enhancement. We hope our work will help ease future research on compositional 3D Vision.
CoT3DRef: Chain-of-Thoughts Data-Efficient 3D Visual Grounding
Oct 10, 2023
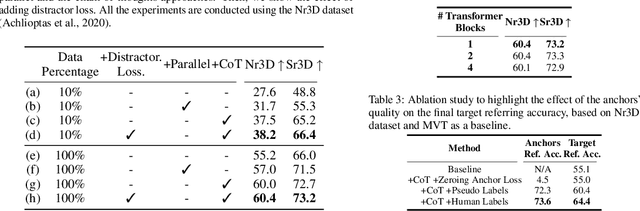
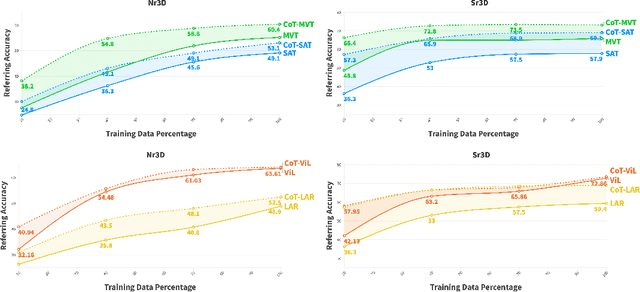
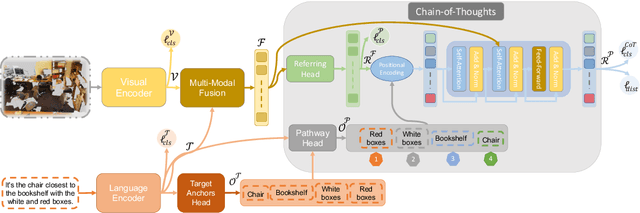
3D visual grounding is the ability to localize objects in 3D scenes conditioned by utterances. Most existing methods devote the referring head to localize the referred object directly, causing failure in complex scenarios. In addition, it does not illustrate how and why the network reaches the final decision. In this paper, we address this question Can we design an interpretable 3D visual grounding framework that has the potential to mimic the human perception system?. To this end, we formulate the 3D visual grounding problem as a sequence-to-sequence task by first predicting a chain of anchors and then the final target. Interpretability not only improves the overall performance but also helps us identify failure cases. Following the chain of thoughts approach enables us to decompose the referring task into interpretable intermediate steps, boosting the performance and making our framework extremely data-efficient. Moreover, our proposed framework can be easily integrated into any existing architecture. We validate our approach through comprehensive experiments on the Nr3D, Sr3D, and Scanrefer benchmarks and show consistent performance gains compared to existing methods without requiring manually annotated data. Furthermore, our proposed framework, dubbed CoT3DRef, is significantly data-efficient, whereas on the Sr3D dataset, when trained only on 10% of the data, we match the SOTA performance that trained on the entire data.