 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Object Pose Estimation with Pose Interpreter Networks
Aug 03, 2018
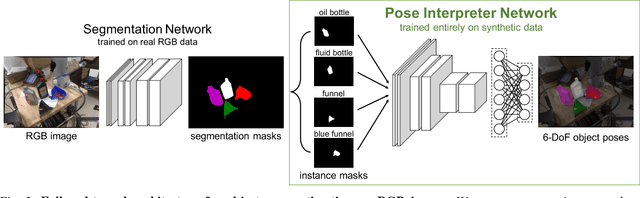
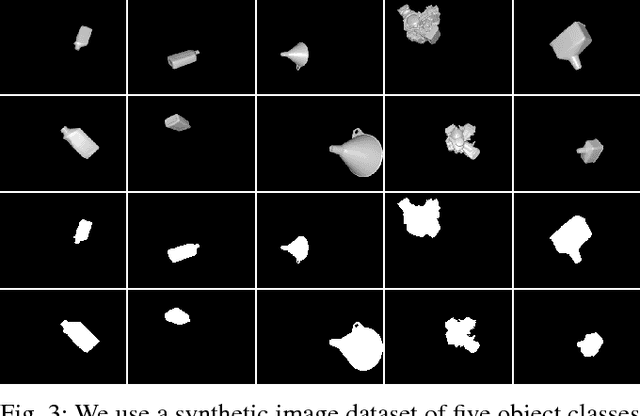
In this work, we introduce pose interpreter networks for 6-DoF object pose estimation. In contrast to other CNN-based approaches to pose estimation that require expensively annotated object pose data, our pose interpreter network is trained entirely on synthetic pose data. We use object masks as an intermediate representation to bridge real and synthetic. We show that when combined with a segmentation model trained on RGB images, our synthetically trained pose interpreter network is able to generalize to real data. Our end-to-end system for object pose estimation runs in real-time (20 Hz) on live RGB data, without using depth information or ICP refinement.
SegICP-DSR: Dense Semantic Scene Reconstruction and Registration
Nov 06, 2017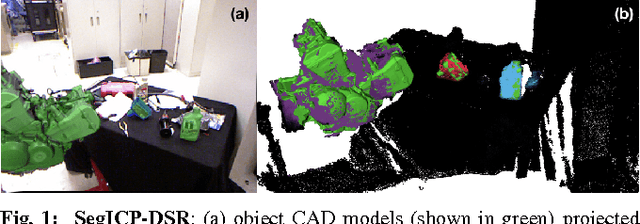

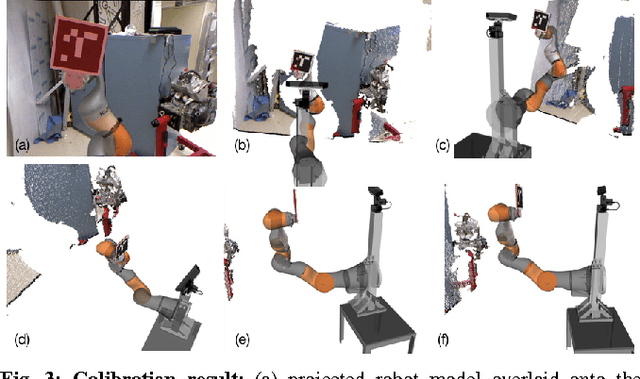
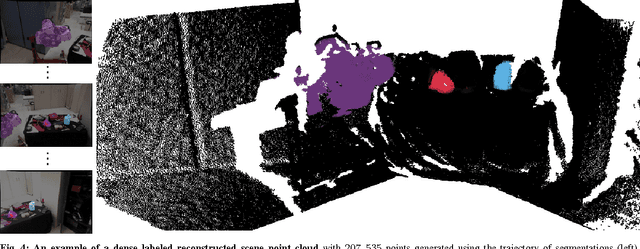
To enable autonomous robotic manipulation in unstructured environments, we present SegICP-DSR, a real- time, dense, semantic scene reconstruction and pose estimation algorithm that achieves mm-level pose accuracy and standard deviation (7.9 mm, {\sigma}=7.6 mm and 1.7 deg, {\sigma}=0.7 deg) and suc- cessfully identified the object pose in 97% of test cases. This represents a 29% increase in accuracy, and a 14% increase in success rate compared to SegICP in cluttered, unstruc- tured environments. The performance increase of SegICP-DSR arises from (1) improved deep semantic segmentation under adversarial training, (2) precise automated calibration of the camera intrinsic and extrinsic parameters, (3) viewpoint specific ray-casting of the model geometry, and (4) dense semantic ElasticFusion point clouds for registration. We benchmark the performance of SegICP-DSR on thousands of pose-annotated video frames and demonstrate its accuracy and efficacy on two tight tolerance grasping and insertion tasks using a KUKA LBR iiwa robotic arm.
SegICP: Integrated Deep Semantic Segmentation and Pose Estimation
Sep 05, 2017

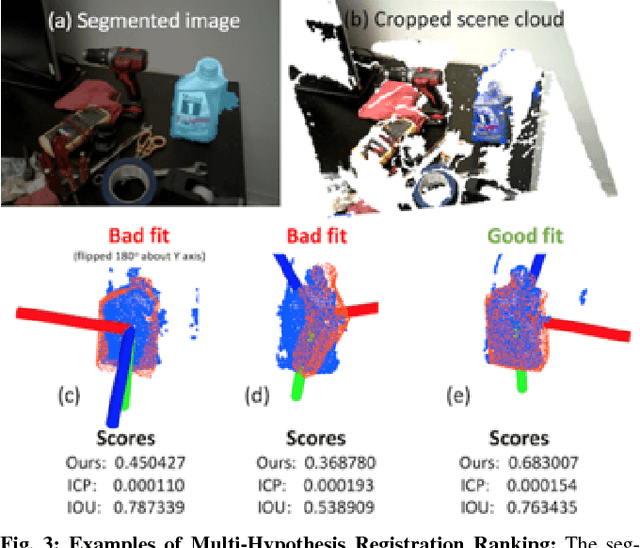
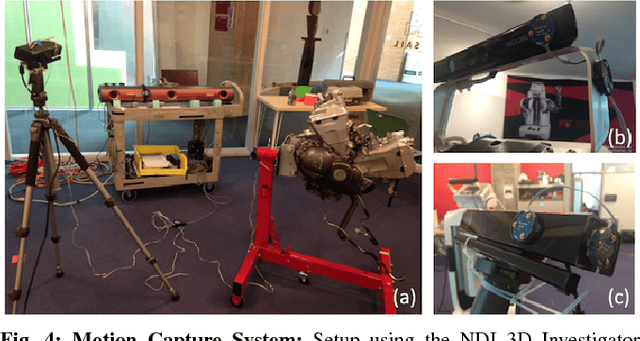
Recent robotic manipulation competitions have highlighted that sophisticated robots still struggle to achieve fast and reliable perception of task-relevant objects in complex, realistic scenarios. To improve these systems' perceptive speed and robustness, we present SegICP, a novel integrated solution to object recognition and pose estimation. SegICP couples convolutional neural networks and multi-hypothesis point cloud registration to achieve both robust pixel-wise semantic segmentation as well as accurate and real-time 6-DOF pose estimation for relevant objects. Our architecture achieves 1cm position error and <5^\circ$ angle error in real time without an initial seed. We evaluate and benchmark SegICP against an annotated dataset generated by motion capture.