 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLBurst: Learning-Based Robotic Burst Feature Extraction for 3D Reconstruction in Low Light
Oct 31, 2024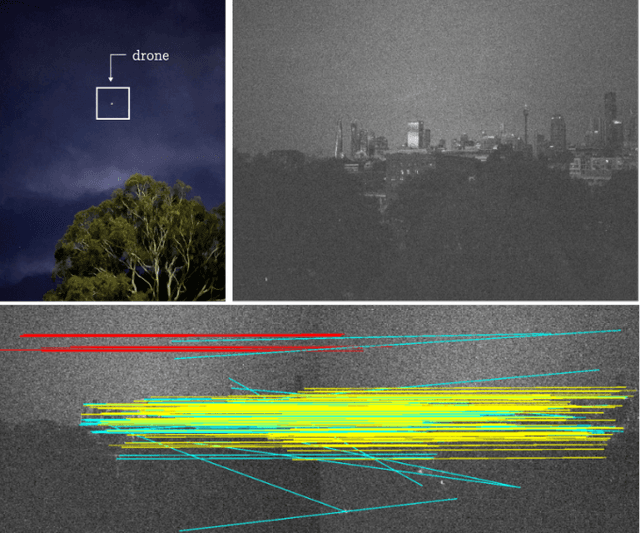

Drones have revolutionized the fields of aerial imaging, mapping, and disaster recovery. However, the deployment of drones in low-light conditions is constrained by the image quality produced by their on-board cameras. In this paper, we present a learning architecture for improving 3D reconstructions in low-light conditions by finding features in a burst. Our approach enhances visual reconstruction by detecting and describing high quality true features and less spurious features in low signal-to-noise ratio images. We demonstrate that our method is capable of handling challenging scenes in millilux illumination, making it a significant step towards drones operating at night and in extremely low-light applications such as underground mining and search and rescue operations.
BuFF: Burst Feature Finder for Light-Constrained 3D Reconstruction
Sep 20, 2022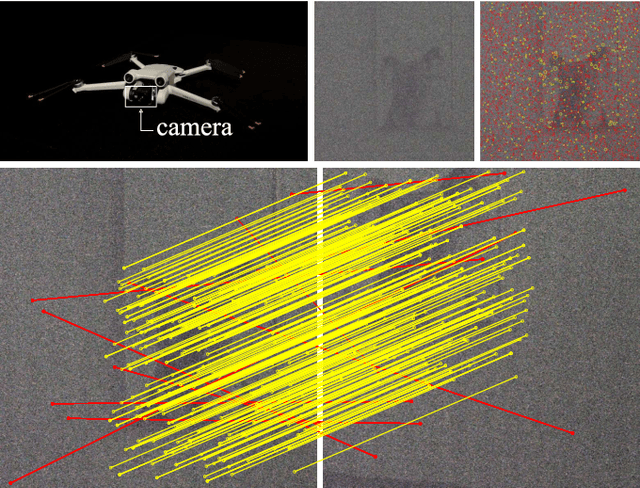

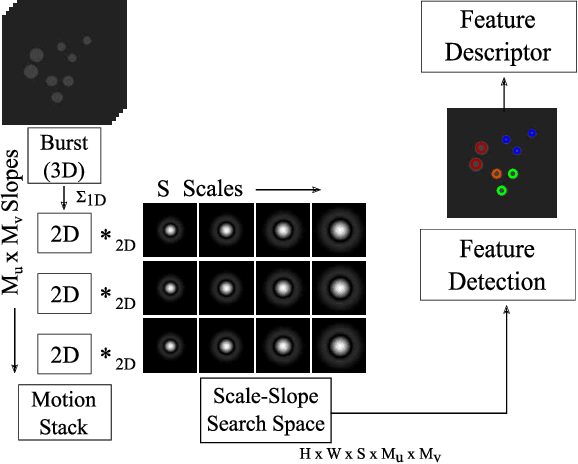

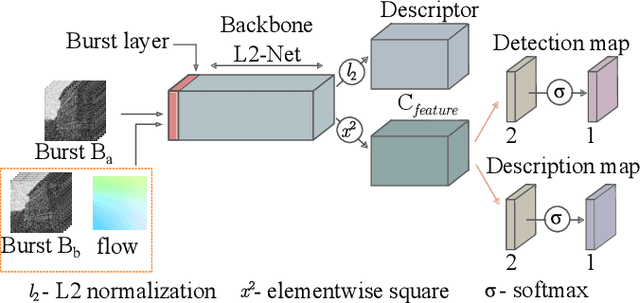
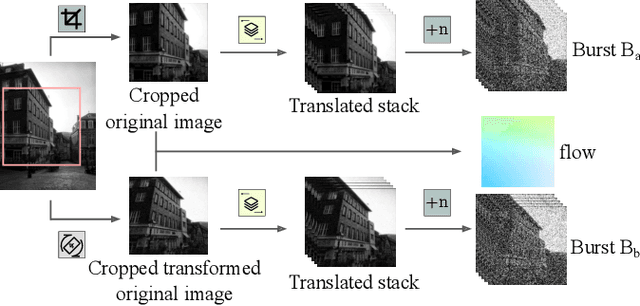
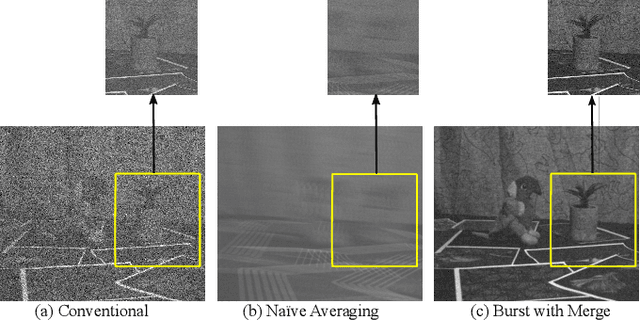
Robots operating at night using conventional vision cameras face significant challenges in reconstruction due to noise-limited images. Previous work has demonstrated that burst-imaging techniques can be used to partially overcome this issue. In this paper, we develop a novel feature detector that operates directly on image bursts that enhances vision-based reconstruction under extremely low-light conditions. Our approach finds keypoints with well-defined scale and apparent motion within each burst by jointly searching in a multi-scale and multi-motion space. Because we describe these features at a stage where the images have higher signal-to-noise ratio, the detected features are more accurate than the state-of-the-art on conventional noisy images and burst-merged images and exhibit high precision, recall, and matching performance. We show improved feature performance and camera pose estimates and demonstrate improved structure-from-motion performance using our feature detector in challenging light-constrained scenes. Our feature finder provides a significant step towards robots operating in low-light scenarios and applications including night-time operations.
Burst Imaging for Light-Constrained Structure-From-Motion
Aug 23, 2021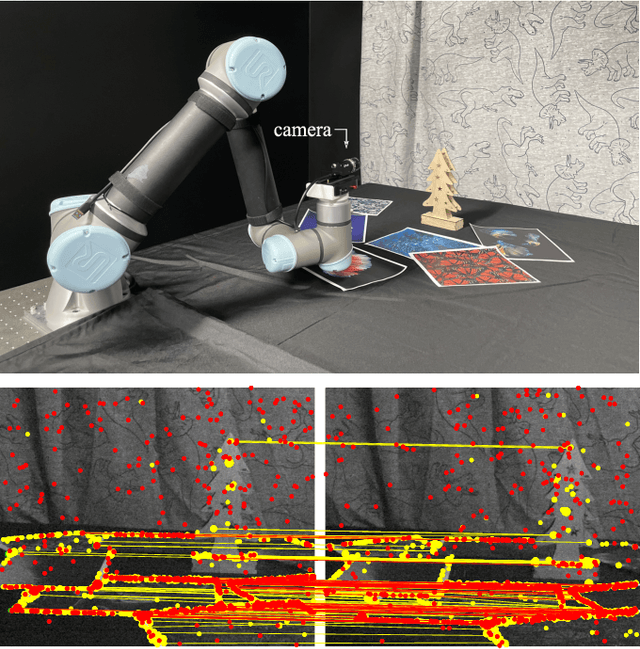
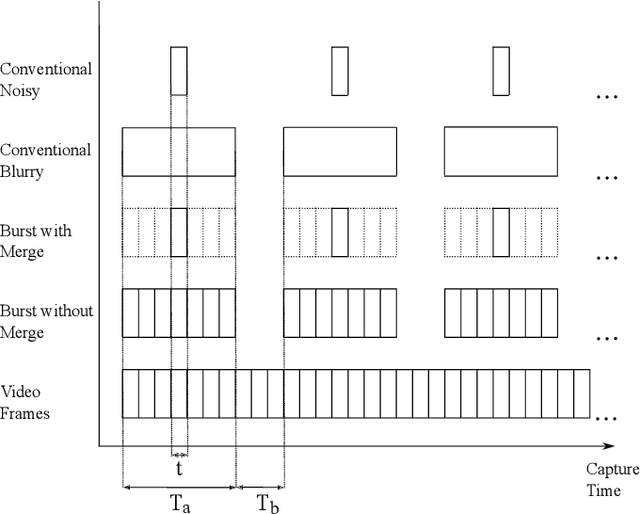
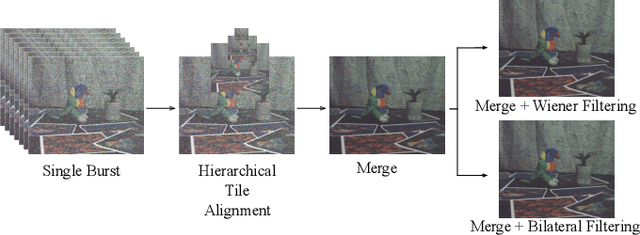
Images captured under extremely low light conditions are noise-limited, which can cause existing robotic vision algorithms to fail. In this paper we develop an image processing technique for aiding 3D reconstruction from images acquired in low light conditions. Our technique, based on burst photography, uses direct methods for image registration within bursts of short exposure time images to improve the robustness and accuracy of feature-based structure-from-motion (SfM). We demonstrate improved SfM performance in challenging light-constrained scenes, including quantitative evaluations that show improved feature performance and camera pose estimates. Additionally, we show that our method converges more frequently to correct reconstructions than the state-of-the-art. Our method is a significant step towards allowing robots to operate in low light conditions, with potential applications to robots operating in environments such as underground mines and night time operation.
A procedure for automated tree pruning suggestion using LiDAR scans of fruit trees
Feb 07, 2021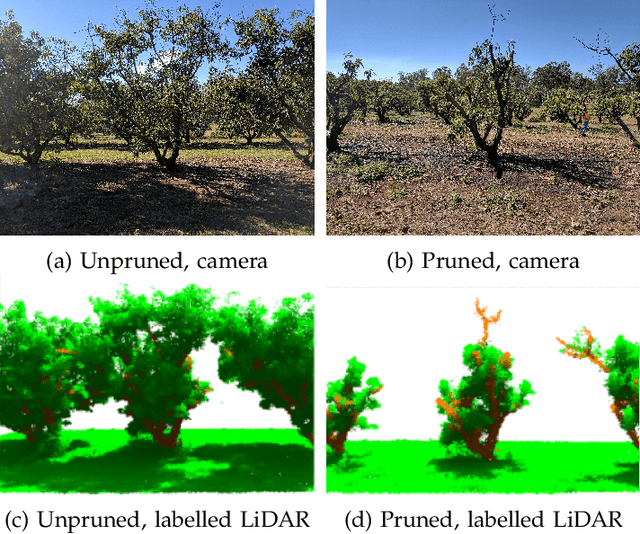
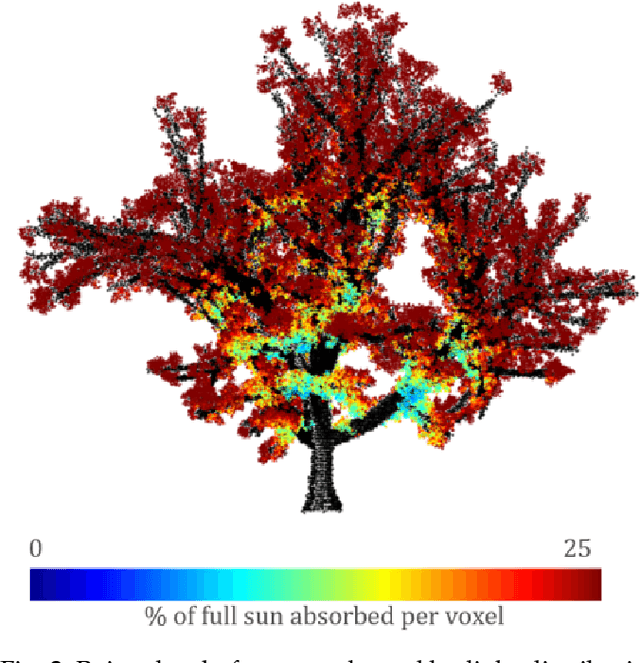
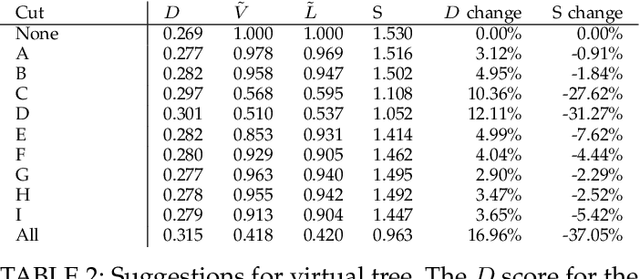
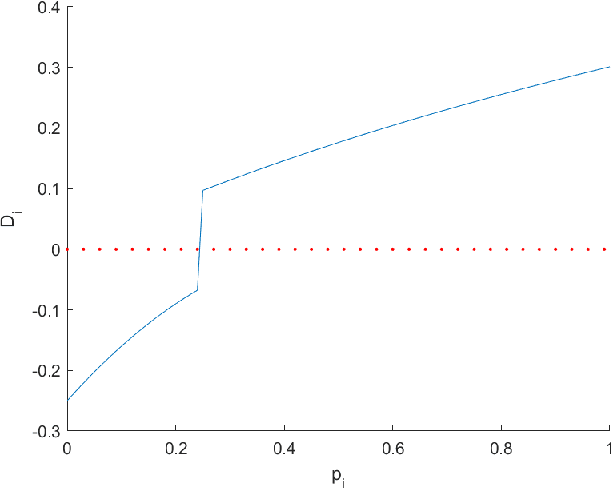
In fruit tree growth, pruning is an important management practice for preventing overcrowding, improving canopy access to light and promoting regrowth. Due to the slow nature of agriculture, decisions in pruning are typically made using tradition or rules of thumb rather than data-driven analysis. Many existing algorithmic, simulation-based approaches rely on high-fidelity digital captures or purely computer-generated fruit trees, and are unable to provide specific results on an orchard scale. We present a framework for suggesting pruning strategies on LiDAR-scanned commercial fruit trees using a scoring function with a focus on improving light distribution throughout the canopy. A scoring function to assess the quality of the tree shape based on its light availability and size was developed for comparative analysis between trees, and was validated against yield characteristics, demonstrating a reasonable correlation against fruit count with an $R^2$ score of 0.615 for avocado and 0.506 for mango. A tool was implemented for simulating pruning by algorithmically estimating which parts of a tree point cloud would be removed given specific cut points using structural analysis of the tree, validated experimentally with an average F1 score of 0.78 across 144 experiments. Finally, new pruning locations were suggested and we used the previous two stages to estimate the improvement of the tree given these suggestions. The light distribution was improved by up to 25.15\%, demonstrating a 16\% improvement over commercial pruning on a real tree, and certain cut points were discovered which improved light distribution with a smaller negative impact on tree volume. The final results suggest value in the framework as a decision making tool for commercial growers, or as a starting point for automated pruning since the entire process can be performed with little human intervention.
SimTreeLS: Simulating aerial and terrestrial laser scans of trees
Nov 24, 2020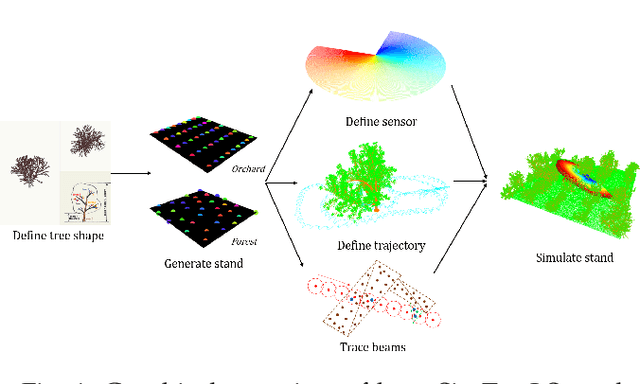
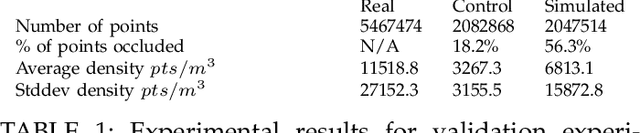
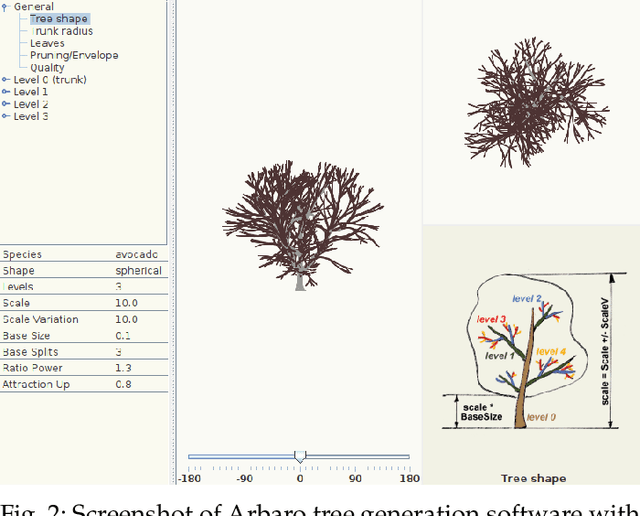
There are numerous emerging applications for digitizing trees using terrestrial and aerial laser scanning, particularly in the fields of agriculture and forestry. Interpretation of LiDAR point clouds is increasingly relying on data-driven methods (such as supervised machine learning) that rely on large quantities of hand-labelled data. As this data is potentially expensive to capture, and difficult to clearly visualise and label manually, a means of supplementing real LiDAR scans with simulated data is becoming a necessary step in realising the potential of these methods. We present an open source tool, SimTreeLS (Simulated Tree Laser Scans), for generating point clouds which simulate scanning with user-defined sensor, trajectory, tree shape and layout parameters. Upon simulation, material classification is kept in a pointwise fashion so leaf and woody matter are perfectly known, and unique identifiers separate individual trees, foregoing post-simulation labelling. This allows for an endless supply of procedurally generated data with similar characteristics to real LiDAR captures, which can then be used for development of data processing techniques or training of machine learning algorithms. To validate our method, we compare the characteristics of a simulated scan with a real scan using similar trees and the same sensor and trajectory parameters. Results suggest the simulated data is significantly more similar to real data than a sample-based control. We also demonstrate application of SimTreeLS on contexts beyond the real data available, simulating scans of new tree shapes, new trajectories and new layouts, with results presenting well. SimTreeLS is available as an open source resource built on publicly available libraries.
Development of a High Fidelity Simulator for Generalised Photometric Based Space Object Classification using Machine Learning
Apr 26, 2020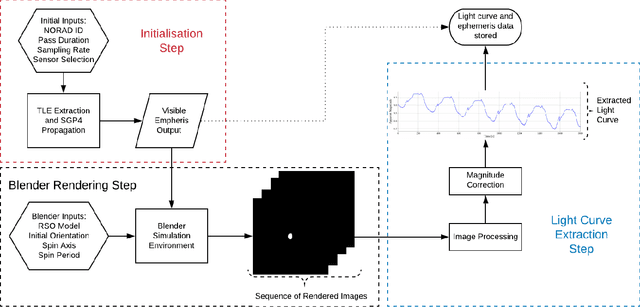
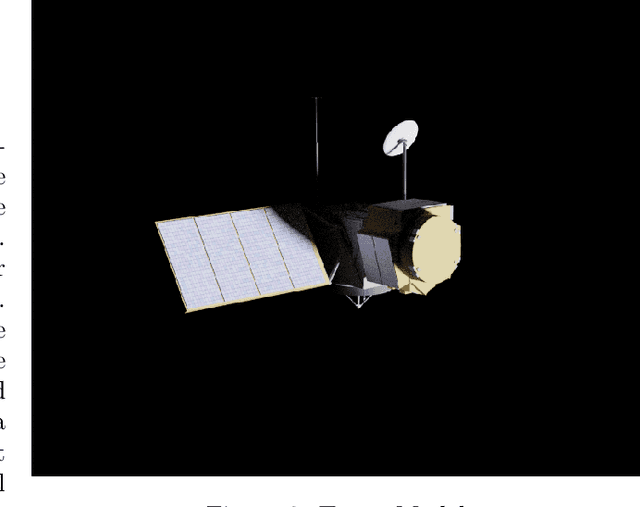
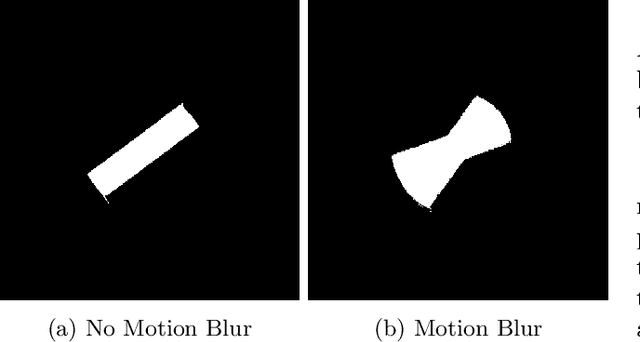
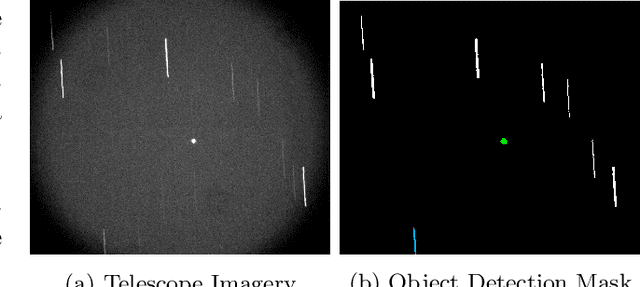
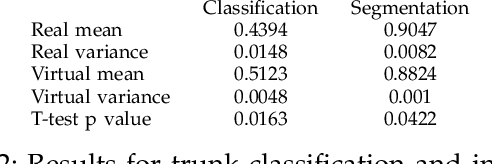
This paper presents the initial stages in the development of a deep learning classifier for generalised Resident Space Object (RSO) characterisation that combines high-fidelity simulated light curves with transfer learning to improve the performance of object characterisation models that are trained on real data. The classification and characterisation of RSOs is a significant goal in Space Situational Awareness (SSA) in order to improve the accuracy of orbital predictions. The specific focus of this paper is the development of a high-fidelity simulation environment for generating realistic light curves. The simulator takes in a textured geometric model of an RSO as well as the objects ephemeris and uses Blender to generate photo-realistic images of the RSO that are then processed to extract the light curve. Simulated light curves have been compared with real light curves extracted from telescope imagery to provide validation for the simulation environment. Future work will involve further validation and the use of the simulator to generate a dataset of realistic light curves for the purpose of training neural networks.
* This paper is a pre-print that appeared in Proceedings of 70th International Astronautical Congress (IAC), 2019
Forest Tree Detection and Segmentation using High Resolution Airborne LiDAR
Oct 30, 2018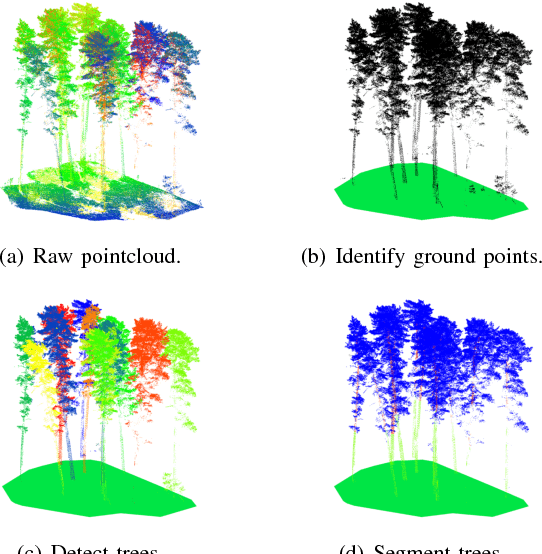
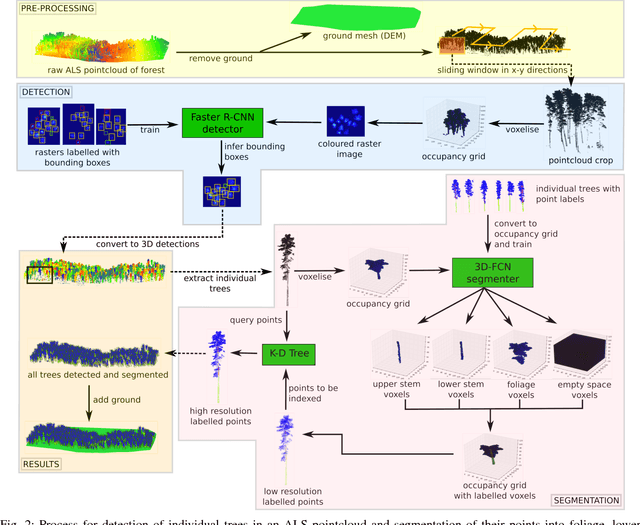
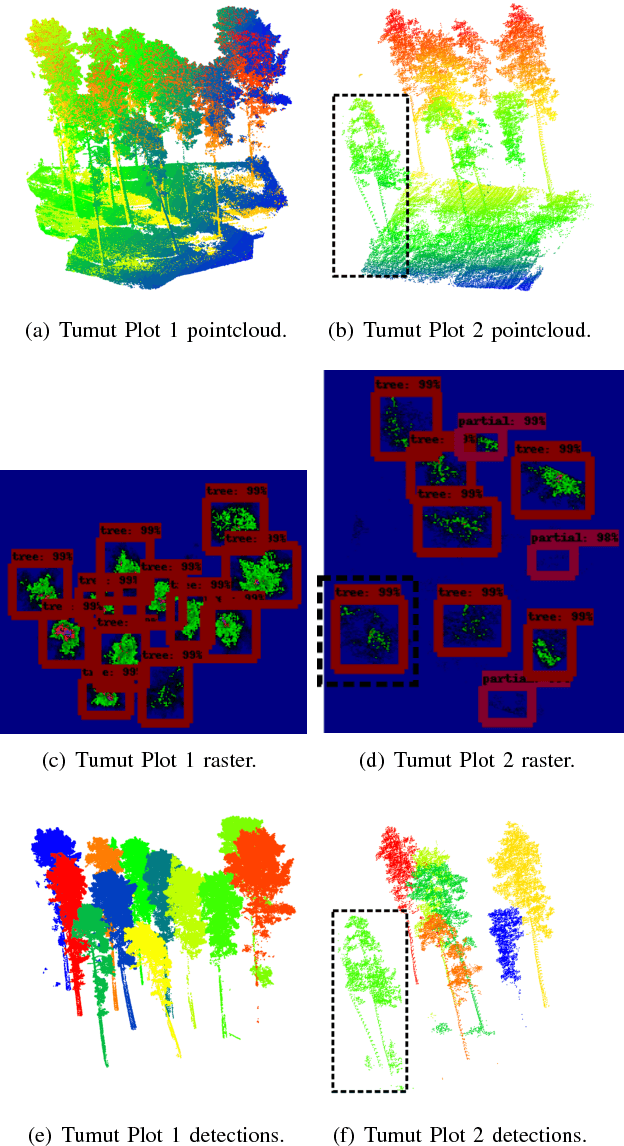
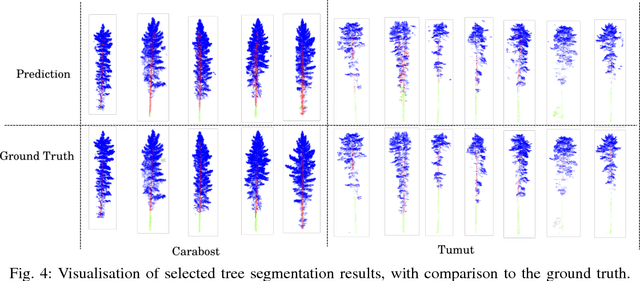
This paper presents an autonomous approach to tree detection and segmentation in high resolution airborne LiDAR that utilises state-of-the-art region-based CNN and 3D-CNN deep learning algorithms. If the number of training examples for a site is low, it is shown to be beneficial to transfer a segmentation network learnt from a different site with more training data and fine-tune it. The algorithm was validated using airborne laser scanning over two different commercial pine plantations. The results show that the proposed approach performs favourably in comparison to other methods for tree detection and segmentation.