 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLBurst: Learning-Based Robotic Burst Feature Extraction for 3D Reconstruction in Low Light
Oct 31, 2024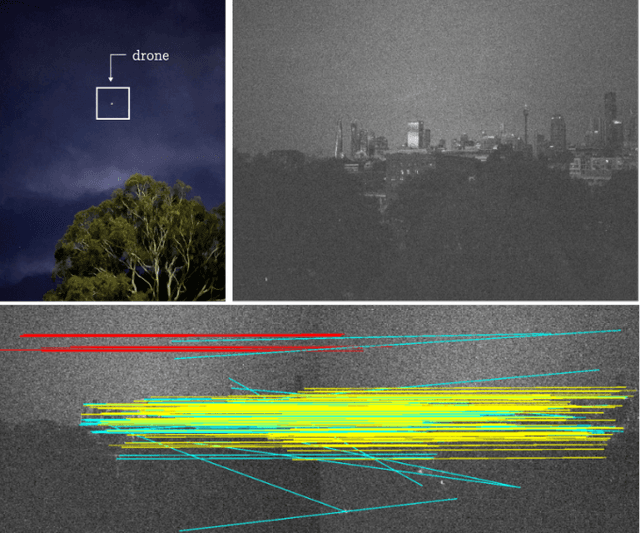
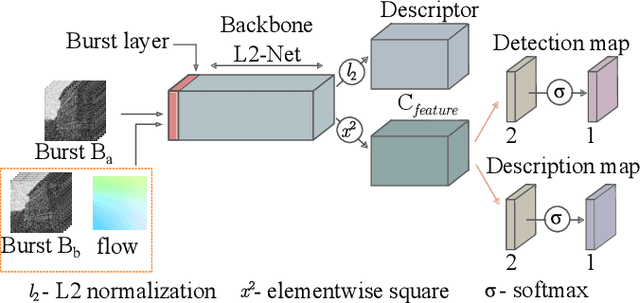
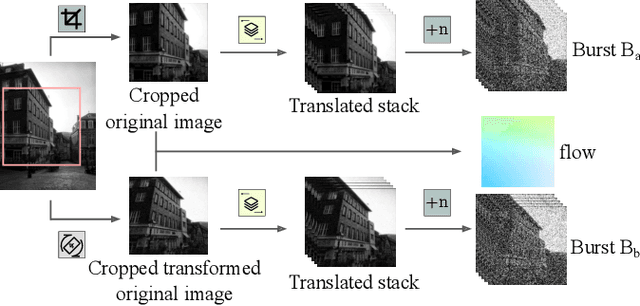

Drones have revolutionized the fields of aerial imaging, mapping, and disaster recovery. However, the deployment of drones in low-light conditions is constrained by the image quality produced by their on-board cameras. In this paper, we present a learning architecture for improving 3D reconstructions in low-light conditions by finding features in a burst. Our approach enhances visual reconstruction by detecting and describing high quality true features and less spurious features in low signal-to-noise ratio images. We demonstrate that our method is capable of handling challenging scenes in millilux illumination, making it a significant step towards drones operating at night and in extremely low-light applications such as underground mining and search and rescue operations.
BuFF: Burst Feature Finder for Light-Constrained 3D Reconstruction
Sep 20, 2022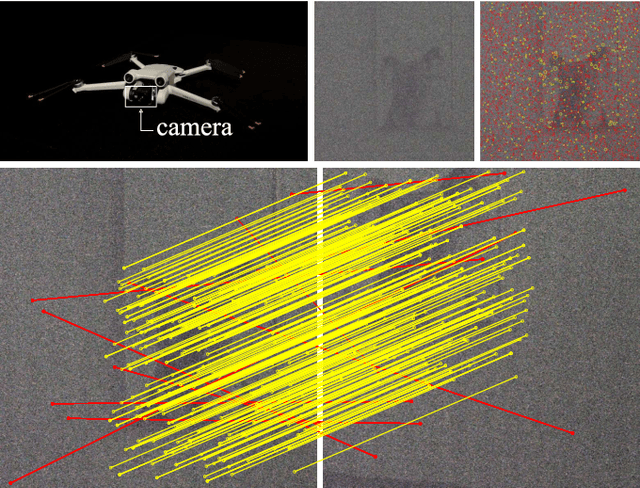

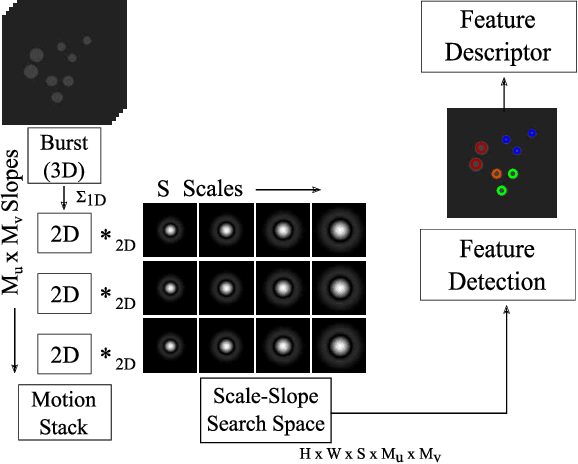

Robots operating at night using conventional vision cameras face significant challenges in reconstruction due to noise-limited images. Previous work has demonstrated that burst-imaging techniques can be used to partially overcome this issue. In this paper, we develop a novel feature detector that operates directly on image bursts that enhances vision-based reconstruction under extremely low-light conditions. Our approach finds keypoints with well-defined scale and apparent motion within each burst by jointly searching in a multi-scale and multi-motion space. Because we describe these features at a stage where the images have higher signal-to-noise ratio, the detected features are more accurate than the state-of-the-art on conventional noisy images and burst-merged images and exhibit high precision, recall, and matching performance. We show improved feature performance and camera pose estimates and demonstrate improved structure-from-motion performance using our feature detector in challenging light-constrained scenes. Our feature finder provides a significant step towards robots operating in low-light scenarios and applications including night-time operations.
Burst Imaging for Light-Constrained Structure-From-Motion
Aug 23, 2021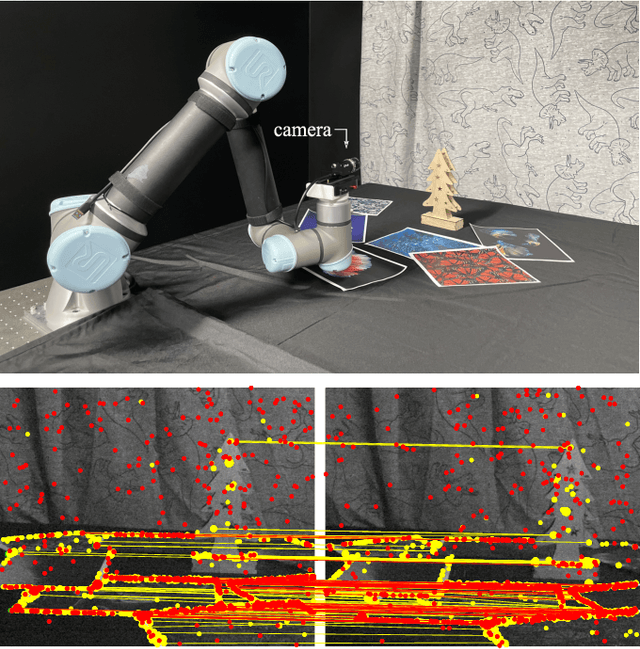
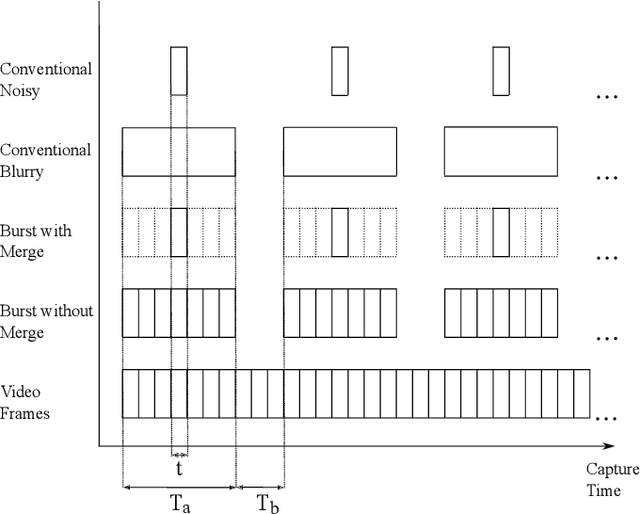
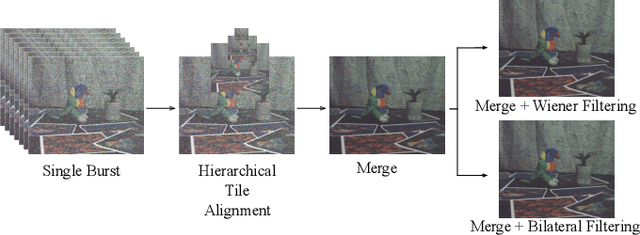
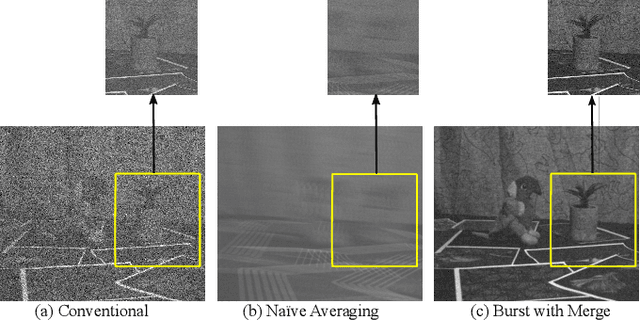
Images captured under extremely low light conditions are noise-limited, which can cause existing robotic vision algorithms to fail. In this paper we develop an image processing technique for aiding 3D reconstruction from images acquired in low light conditions. Our technique, based on burst photography, uses direct methods for image registration within bursts of short exposure time images to improve the robustness and accuracy of feature-based structure-from-motion (SfM). We demonstrate improved SfM performance in challenging light-constrained scenes, including quantitative evaluations that show improved feature performance and camera pose estimates. Additionally, we show that our method converges more frequently to correct reconstructions than the state-of-the-art. Our method is a significant step towards allowing robots to operate in low light conditions, with potential applications to robots operating in environments such as underground mines and night time operation.
Unsupervised Learning of Depth Estimation and Visual Odometry for Sparse Light Field Cameras
Mar 21, 2021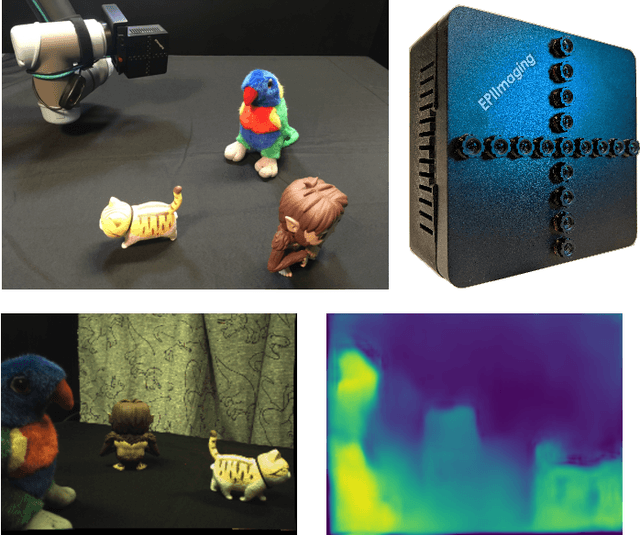
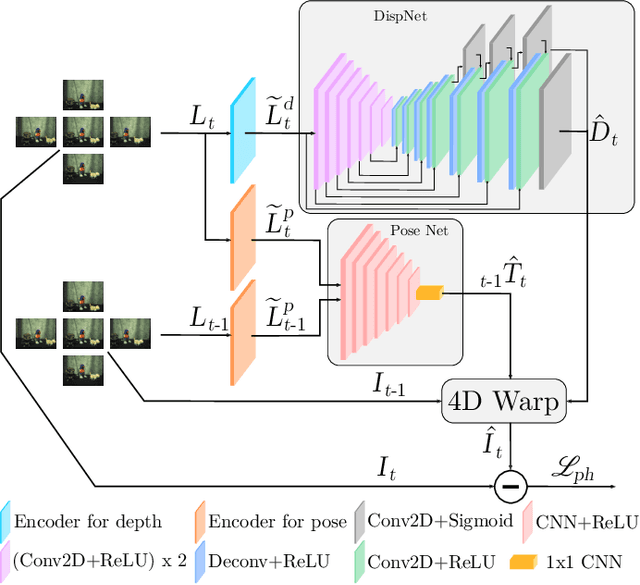
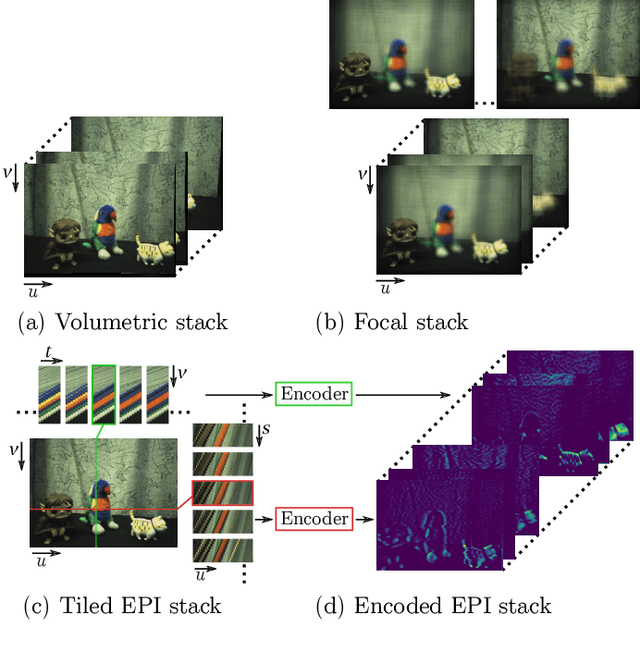
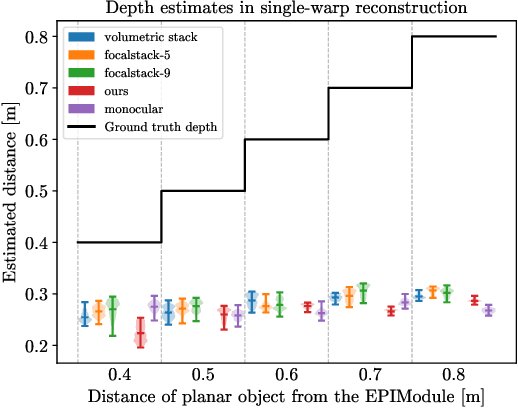
While an exciting diversity of new imaging devices is emerging that could dramatically improve robotic perception, the challenges of calibrating and interpreting these cameras have limited their uptake in the robotics community. In this work we generalise techniques from unsupervised learning to allow a robot to autonomously interpret new kinds of cameras. We consider emerging sparse light field (LF) cameras, which capture a subset of the 4D LF function describing the set of light rays passing through a plane. We introduce a generalised encoding of sparse LFs that allows unsupervised learning of odometry and depth. We demonstrate the proposed approach outperforming monocular and conventional techniques for dealing with 4D imagery, yielding more accurate odometry and depth maps and delivering these with metric scale. We anticipate our technique to generalise to a broad class of LF and sparse LF cameras, and to enable unsupervised recalibration for coping with shifts in camera behaviour over the lifetime of a robot. This work represents a first step toward streamlining the integration of new kinds of imaging devices in robotics applications.