 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBuFF: Burst Feature Finder for Light-Constrained 3D Reconstruction
Paper and Code
Sep 20, 2022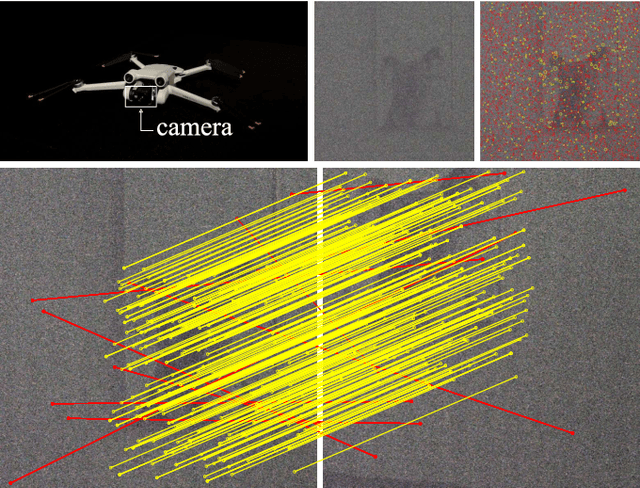

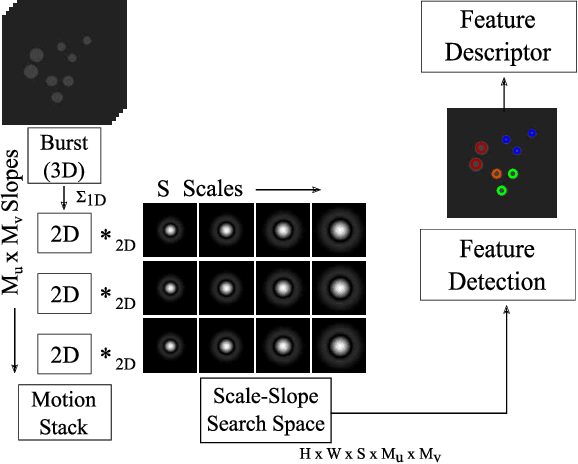

Robots operating at night using conventional vision cameras face significant challenges in reconstruction due to noise-limited images. Previous work has demonstrated that burst-imaging techniques can be used to partially overcome this issue. In this paper, we develop a novel feature detector that operates directly on image bursts that enhances vision-based reconstruction under extremely low-light conditions. Our approach finds keypoints with well-defined scale and apparent motion within each burst by jointly searching in a multi-scale and multi-motion space. Because we describe these features at a stage where the images have higher signal-to-noise ratio, the detected features are more accurate than the state-of-the-art on conventional noisy images and burst-merged images and exhibit high precision, recall, and matching performance. We show improved feature performance and camera pose estimates and demonstrate improved structure-from-motion performance using our feature detector in challenging light-constrained scenes. Our feature finder provides a significant step towards robots operating in low-light scenarios and applications including night-time operations.