 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA procedure for automated tree pruning suggestion using LiDAR scans of fruit trees
Feb 07, 2021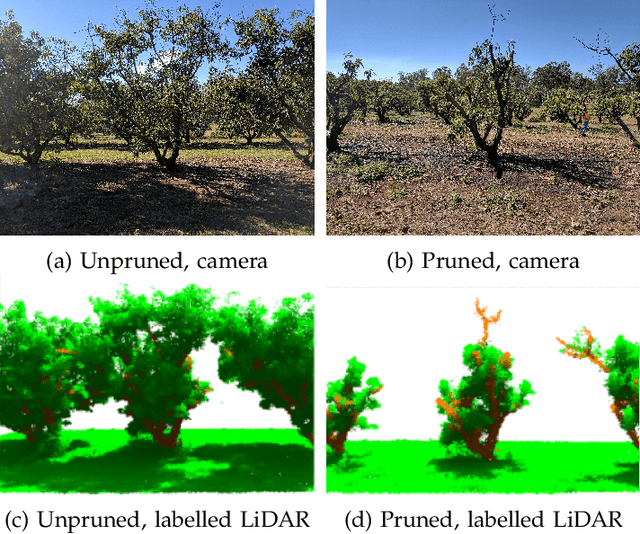
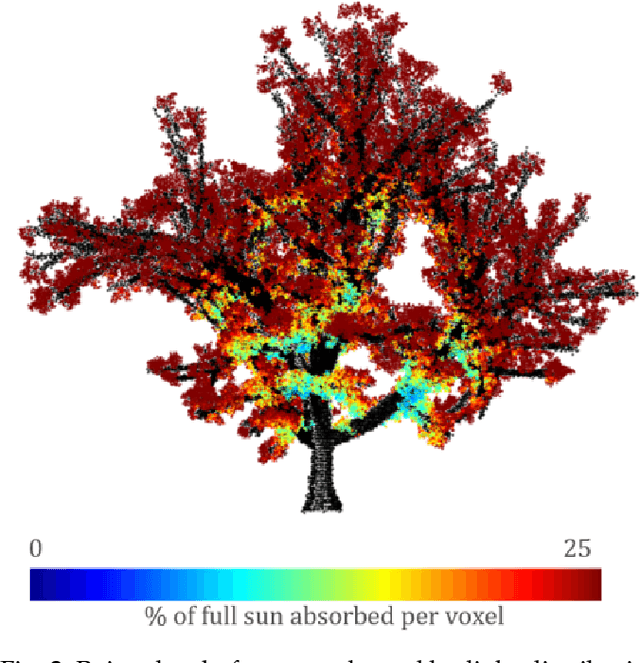
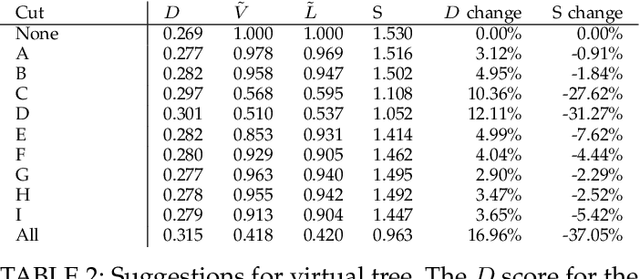
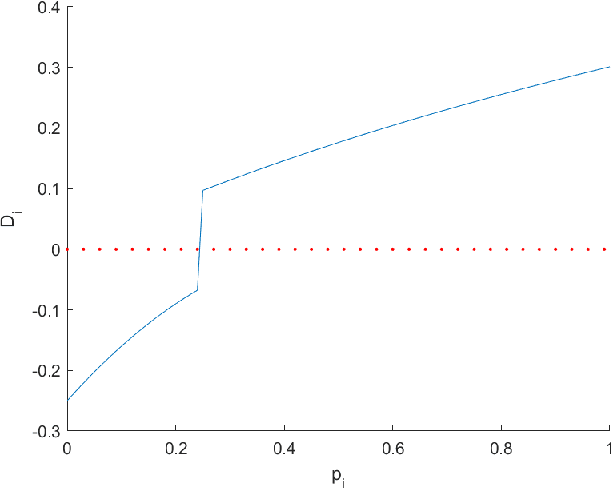
In fruit tree growth, pruning is an important management practice for preventing overcrowding, improving canopy access to light and promoting regrowth. Due to the slow nature of agriculture, decisions in pruning are typically made using tradition or rules of thumb rather than data-driven analysis. Many existing algorithmic, simulation-based approaches rely on high-fidelity digital captures or purely computer-generated fruit trees, and are unable to provide specific results on an orchard scale. We present a framework for suggesting pruning strategies on LiDAR-scanned commercial fruit trees using a scoring function with a focus on improving light distribution throughout the canopy. A scoring function to assess the quality of the tree shape based on its light availability and size was developed for comparative analysis between trees, and was validated against yield characteristics, demonstrating a reasonable correlation against fruit count with an $R^2$ score of 0.615 for avocado and 0.506 for mango. A tool was implemented for simulating pruning by algorithmically estimating which parts of a tree point cloud would be removed given specific cut points using structural analysis of the tree, validated experimentally with an average F1 score of 0.78 across 144 experiments. Finally, new pruning locations were suggested and we used the previous two stages to estimate the improvement of the tree given these suggestions. The light distribution was improved by up to 25.15\%, demonstrating a 16\% improvement over commercial pruning on a real tree, and certain cut points were discovered which improved light distribution with a smaller negative impact on tree volume. The final results suggest value in the framework as a decision making tool for commercial growers, or as a starting point for automated pruning since the entire process can be performed with little human intervention.
SimTreeLS: Simulating aerial and terrestrial laser scans of trees
Nov 24, 2020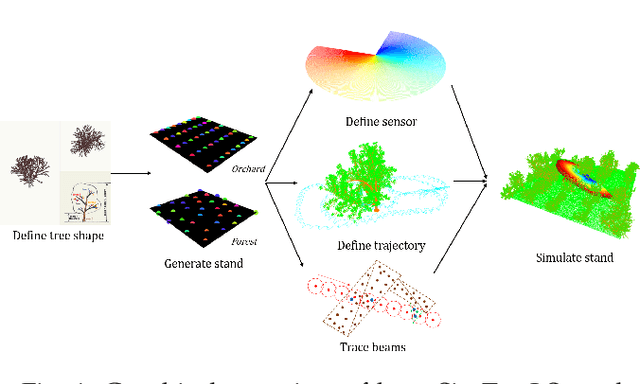
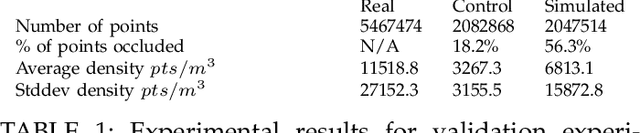
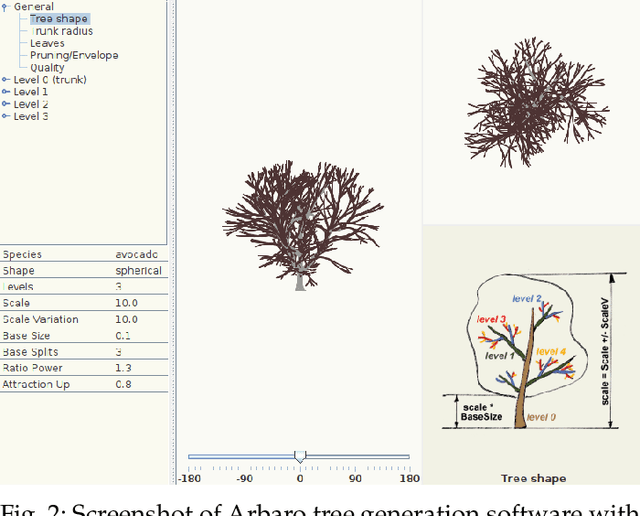
There are numerous emerging applications for digitizing trees using terrestrial and aerial laser scanning, particularly in the fields of agriculture and forestry. Interpretation of LiDAR point clouds is increasingly relying on data-driven methods (such as supervised machine learning) that rely on large quantities of hand-labelled data. As this data is potentially expensive to capture, and difficult to clearly visualise and label manually, a means of supplementing real LiDAR scans with simulated data is becoming a necessary step in realising the potential of these methods. We present an open source tool, SimTreeLS (Simulated Tree Laser Scans), for generating point clouds which simulate scanning with user-defined sensor, trajectory, tree shape and layout parameters. Upon simulation, material classification is kept in a pointwise fashion so leaf and woody matter are perfectly known, and unique identifiers separate individual trees, foregoing post-simulation labelling. This allows for an endless supply of procedurally generated data with similar characteristics to real LiDAR captures, which can then be used for development of data processing techniques or training of machine learning algorithms. To validate our method, we compare the characteristics of a simulated scan with a real scan using similar trees and the same sensor and trajectory parameters. Results suggest the simulated data is significantly more similar to real data than a sample-based control. We also demonstrate application of SimTreeLS on contexts beyond the real data available, simulating scans of new tree shapes, new trajectories and new layouts, with results presenting well. SimTreeLS is available as an open source resource built on publicly available libraries.
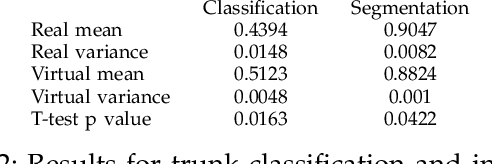
Graph-based methods for analyzing orchard tree structure using noisy point cloud data
Sep 29, 2020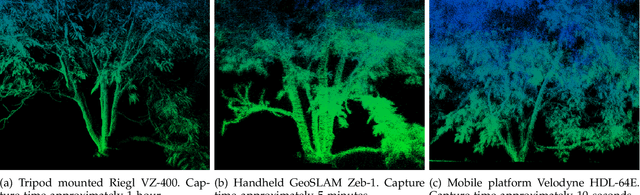

Digitisation of fruit trees using LiDAR enables analysis which can be used to better growing practices to improve yield. Sophisticated analysis requires geometric and semantic understanding of the data, including the ability to discern individual trees as well as identifying leafy and structural matter. Extraction of this information should be rapid, as should data capture, so that entire orchards can be processed, but existing methods for classification and segmentation rely on high-quality data or additional data sources like cameras. We present a method for analysis of LiDAR data specifically for individual tree location, segmentation and matter classification, which can operate on low-quality data captured by handheld or mobile LiDAR. Results demonstrate viability both on real data for avocado and mango trees and virtual data with independently controlled sensor noise and tree spacing.