 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComputer-assisted polyp matching between optical colonoscopy and CT colonography: a phantom study
Jan 15, 2015Potentially precancerous polyps detected with CT colonography (CTC) need to be removed subsequently, using an optical colonoscope (OC). Due to large colonic deformations induced by the colonoscope, even very experienced colonoscopists find it difficult to pinpoint the exact location of the colonoscope tip in relation to polyps reported on CTC. This can cause unduly prolonged OC examinations that are stressful for the patient, colonoscopist and supporting staff. We developed a method, based on monocular 3D reconstruction from OC images, that automatically matches polyps observed in OC with polyps reported on prior CTC. A matching cost is computed, using rigid point-based registration between surface point clouds extracted from both modalities. A 3D printed and painted phantom of a 25 cm long transverse colon segment was used to validate the method on two medium sized polyps. Results indicate that the matching cost is smaller at the correct corresponding polyp between OC and CTC: the value is 3.9 times higher at the incorrect polyp, comparing the correct match between polyps to the incorrect match. Furthermore, we evaluate the matching of the reconstructed polyp from OC with other colonic endoluminal surface structures such as haustral folds and show that there is a minimum at the correct polyp from CTC. Automated matching between polyps observed at OC and prior CTC would facilitate the biopsy or removal of true-positive pathology or exclusion of false-positive CTC findings, and would reduce colonoscopy false-negative (missed) polyps. Ultimately, such a method might reduce healthcare costs, patient inconvenience and discomfort.
* This paper was presented at the SPIE Medical Imaging 2014 conference
Local Structure Matching Driven by Joint-Saliency-Structure Adaptive Kernel Regression
Apr 15, 2013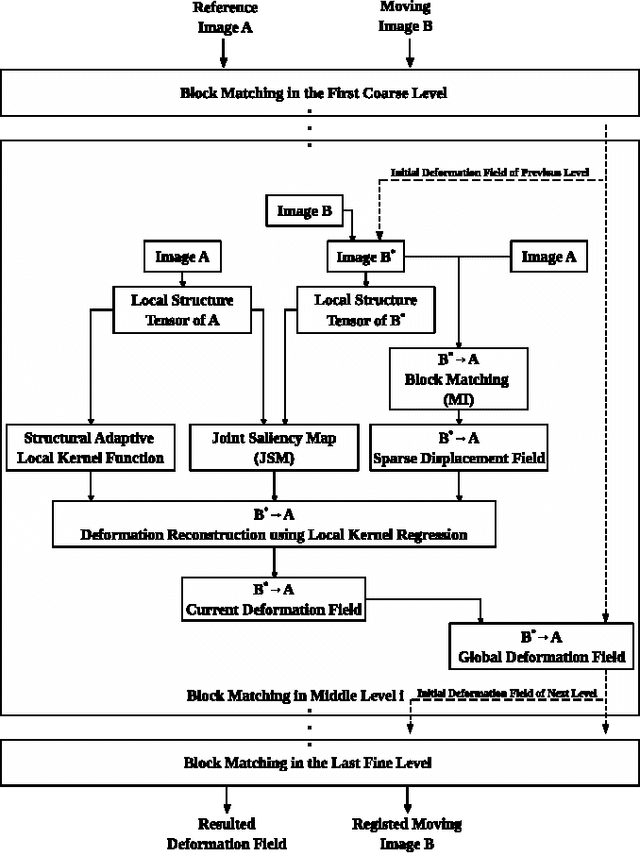

For nonrigid image registration, matching the particular structures (or the outliers) that have missing correspondence and/or local large deformations, can be more difficult than matching the common structures with small deformations in the two images. Most existing works depend heavily on the outlier segmentation to remove the outlier effect in the registration. Moreover, these works do not handle simultaneously the missing correspondences and local large deformations. In this paper, we defined the nonrigid image registration as a local adaptive kernel regression which locally reconstruct the moving image's dense deformation vectors from the sparse deformation vectors in the multi-resolution block matching. The kernel function of the kernel regression adapts its shape and orientation to the reference image's structure to gather more deformation vector samples of the same structure for the iterative regression computation, whereby the moving image's local deformations could be compliant with the reference image's local structures. To estimate the local deformations around the outliers, we use joint saliency map that highlights the corresponding saliency structures (called Joint Saliency Structures, JSSs) in the two images to guide the dense deformation reconstruction by emphasizing those JSSs' sparse deformation vectors in the kernel regression. The experimental results demonstrate that by using local JSS adaptive kernel regression, the proposed method achieves almost the best performance in alignment of all challenging image pairs with outlier structures compared with other five state-of-the-art nonrigid registration algorithms.