 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBehavior-Regularized Diffusion Policy Optimization for Offline Reinforcement Learning
Feb 07, 2025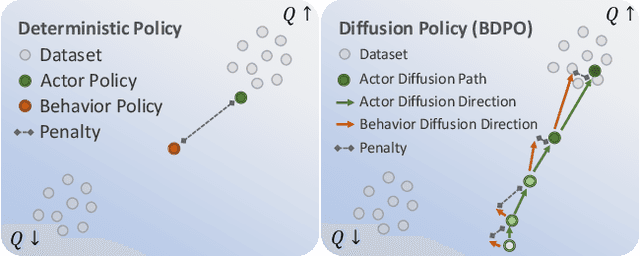
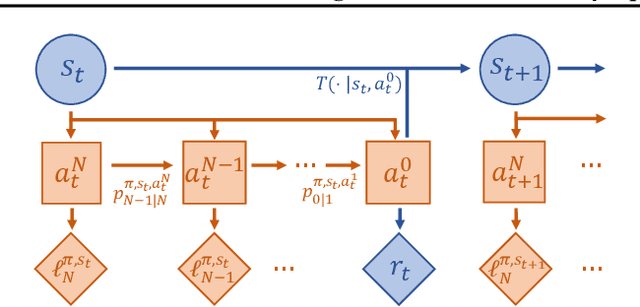
The primary focus of offline reinforcement learning (RL) is to manage the risk of hazardous exploitation of out-of-distribution actions. An effective approach to achieve this goal is through behavior regularization, which augments conventional RL objectives by incorporating constraints that enforce the policy to remain close to the behavior policy. Nevertheless, existing literature on behavior-regularized RL primarily focuses on explicit policy parameterizations, such as Gaussian policies. Consequently, it remains unclear how to extend this framework to more advanced policy parameterizations, such as diffusion models. In this paper, we introduce BDPO, a principled behavior-regularized RL framework tailored for diffusion-based policies, thereby combining the expressive power of diffusion policies and the robustness provided by regularization. The key ingredient of our method is to calculate the Kullback-Leibler (KL) regularization analytically as the accumulated discrepancies in reverse-time transition kernels along the diffusion trajectory. By integrating the regularization, we develop an efficient two-time-scale actor-critic RL algorithm that produces the optimal policy while respecting the behavior constraint. Comprehensive evaluations conducted on synthetic 2D tasks and continuous control tasks from the D4RL benchmark validate its effectiveness and superior performance.
ACT: Empowering Decision Transformer with Dynamic Programming via Advantage Conditioning
Sep 12, 2023Decision Transformer (DT), which employs expressive sequence modeling techniques to perform action generation, has emerged as a promising approach to offline policy optimization. However, DT generates actions conditioned on a desired future return, which is known to bear some weaknesses such as the susceptibility to environmental stochasticity. To overcome DT's weaknesses, we propose to empower DT with dynamic programming. Our method comprises three steps. First, we employ in-sample value iteration to obtain approximated value functions, which involves dynamic programming over the MDP structure. Second, we evaluate action quality in context with estimated advantages. We introduce two types of advantage estimators, IAE and GAE, which are suitable for different tasks. Third, we train an Advantage-Conditioned Transformer (ACT) to generate actions conditioned on the estimated advantages. Finally, during testing, ACT generates actions conditioned on a desired advantage. Our evaluation results validate that, by leveraging the power of dynamic programming, ACT demonstrates effective trajectory stitching and robust action generation in spite of the environmental stochasticity, outperforming baseline methods across various benchmarks. Additionally, we conduct an in-depth analysis of ACT's various design choices through ablation studies.