 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSURENA IV: Towards A Cost-effective Full-size Humanoid Robot for Real-world Scenarios
Aug 30, 2021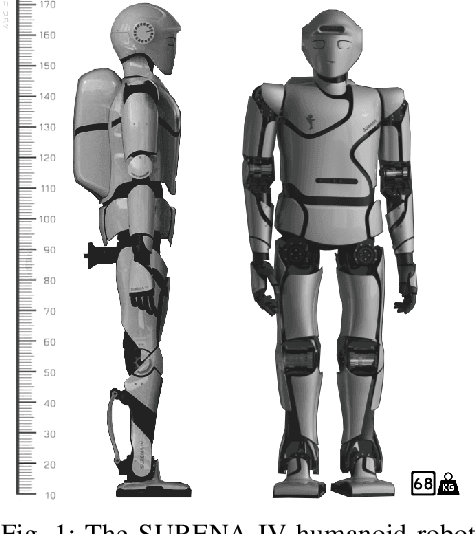
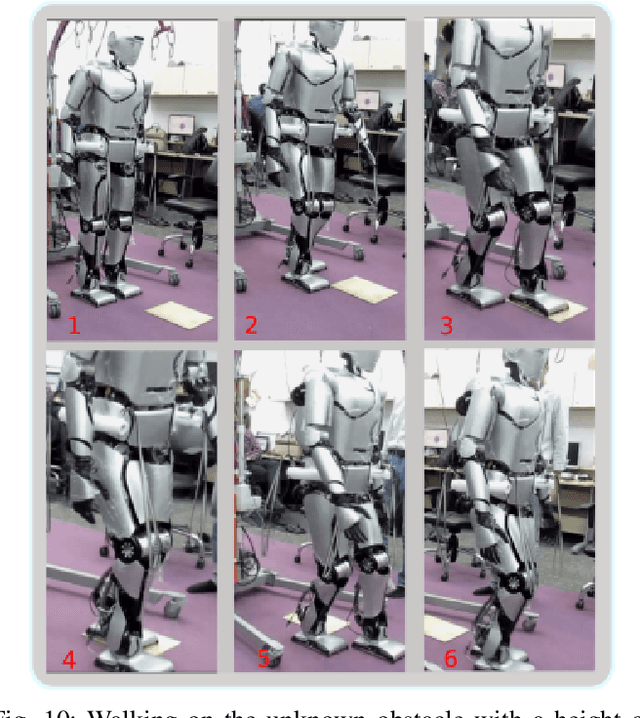

This paper describes the hardware, software framework, and experimental testing of SURENA IV humanoid robotics platform. SURENA IV has 43 degrees of freedom (DoFs), including seven DoFs for each arm, six DoFs for each hand, and six DoFs for each leg, with a height of 170 cm and a mass of 68 kg and morphological and mass properties similar to an average adult human. SURENA IV aims to realize a cost-effective and anthropomorphic humanoid robot for real-world scenarios. In this way, we demonstrate a locomotion framework based on a novel and inexpensive predictive foot sensor that enables walking with 7cm foot position error because of accumulative error of links and connections' deflection(that has been manufactured by the tools which are available in the Universities). Thanks to this sensor, the robot can walk on unknown obstacles without any force feedback, by online adaptation of foot height and orientation. Moreover, the arm and hand of the robot have been designed to grasp the objects with different stiffness and geometries that enable the robot to do drilling, visual servoing of a moving object, and writing his name on the white-board.
Hybrid leg compliance enables robots to operate with sensorimotor delays and low control update frequencies
Jan 28, 2021Animals locomote robustly and agile, albeit significant sensorimotor delays of their nervous system. The sensorimotor control of legged robots is implemented with much higher frequencies-often in the kilohertz range-and sensor and actuator delays in the low millisecond range. But especially at harsh impacts with unknown touch-down timing, legged robots show unstable controller behaviors, while animals are seemingly not impacted. Here we examine this discrepancy and suggest a hybrid robotic leg and controller design. We implemented a physical, parallel joint compliance dimensioned in combination with an active, virtual leg length controller. We present an extensive set of systematic experiments both in computer simulation and hardware. Our hybrid leg and controller design shows previously unseen robustness, in the presence of sensorimotor delays up to 60 ms, or control frequencies as low as 20 Hz, for a drop landing task from 1.3 leg lengths high and with a passive compliance ratio of 0.7. In computer simulations, we report successful drop-landings of the hybrid compliant leg from 3.8 leg lengths (1.2 m) for a 2 kg quadruped robot with 100 Hz control frequency and a sensorimotor delay of 35 ms. The results of our presented hybrid leg design and control provide a further explanation for the performance robustness of animals, and the resulting discrepancy between animals and legged robots.