 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Open-Source Modular Treadmill for Dynamic Force Measurement with Load Dependant Range Adjustment
Mar 25, 2023
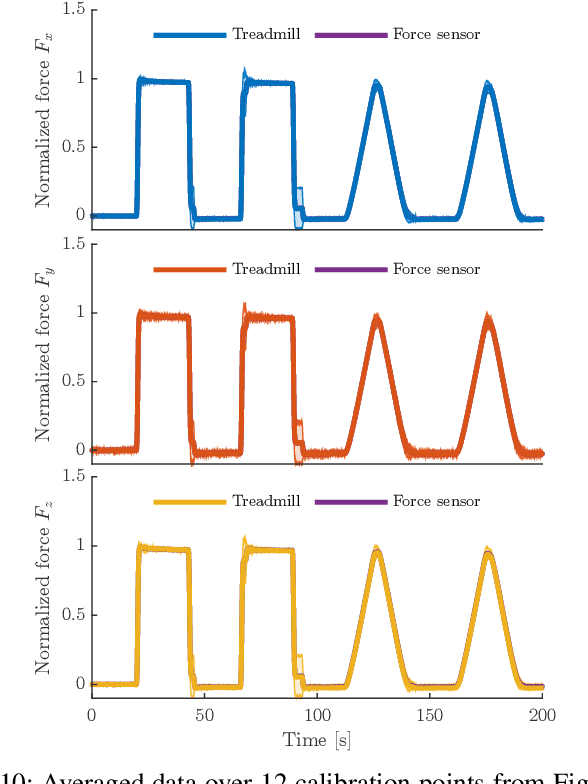

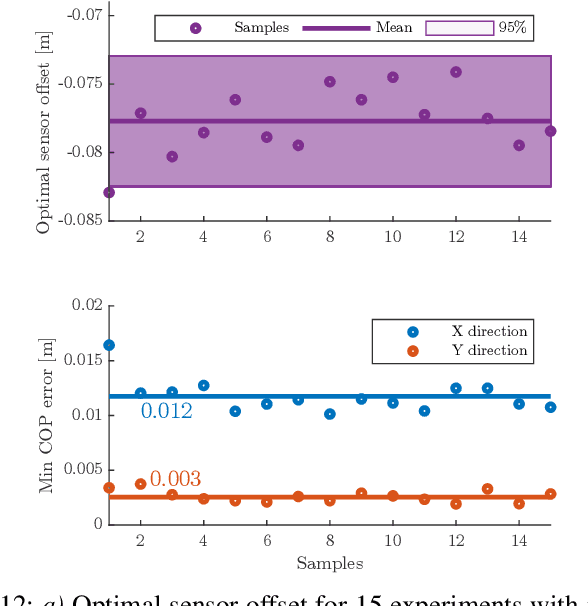
Ground reaction force sensing is one of the key components of gait analysis in legged locomotion research. To measure continuous force data during locomotion, we present a novel compound instrumented treadmill design. The treadmill is 1.7m long, with a natural frequency of 170Hz and an adjustable range that can be used for humans and small robots alike. Here, we present the treadmill's design methodology and characterize it in its natural frequency, noise behavior and real-life performance. Additionally, we apply an ISO 376 norm conform calibration procedure for all spatial force directions and center of pressure position. We achieve a force accuracy of $\leq$5.6N for the ground reaction forces and $\leq$13mm in center of pressure position.
Hybrid leg compliance enables robots to operate with sensorimotor delays and low control update frequencies
Jan 28, 2021Animals locomote robustly and agile, albeit significant sensorimotor delays of their nervous system. The sensorimotor control of legged robots is implemented with much higher frequencies-often in the kilohertz range-and sensor and actuator delays in the low millisecond range. But especially at harsh impacts with unknown touch-down timing, legged robots show unstable controller behaviors, while animals are seemingly not impacted. Here we examine this discrepancy and suggest a hybrid robotic leg and controller design. We implemented a physical, parallel joint compliance dimensioned in combination with an active, virtual leg length controller. We present an extensive set of systematic experiments both in computer simulation and hardware. Our hybrid leg and controller design shows previously unseen robustness, in the presence of sensorimotor delays up to 60 ms, or control frequencies as low as 20 Hz, for a drop landing task from 1.3 leg lengths high and with a passive compliance ratio of 0.7. In computer simulations, we report successful drop-landings of the hybrid compliant leg from 3.8 leg lengths (1.2 m) for a 2 kg quadruped robot with 100 Hz control frequency and a sensorimotor delay of 35 ms. The results of our presented hybrid leg design and control provide a further explanation for the performance robustness of animals, and the resulting discrepancy between animals and legged robots.