 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeREALMS2 -- Resilient Exploration And Lunar Mapping System 2 -- A Comprehensive Approach
Oct 30, 2025The European Space Agency (ESA) and the European Space Resources Innovation Centre (ESRIC) created the Space Resources Challenge to invite researchers and companies to propose innovative solutions for Multi-Robot Systems (MRS) space prospection. This paper proposes the Resilient Exploration And Lunar Mapping System 2 (REALMS2), a MRS framework for planetary prospection and mapping. Based on Robot Operating System version 2 (ROS 2) and enhanced with Visual Simultaneous Localisation And Mapping (vSLAM) for map generation, REALMS2 uses a mesh network for a robust ad hoc network. A single graphical user interface (GUI) controls all the rovers, providing a simple overview of the robotic mission. This system is designed for heterogeneous multi-robot exploratory missions, tackling the challenges presented by extraterrestrial environments. REALMS2 was used during the second field test of the ESA-ESRIC Challenge and allowed to map around 60% of the area, using three homogeneous rovers while handling communication delays and blackouts.
OmniUnet: A Multimodal Network for Unstructured Terrain Segmentation on Planetary Rovers Using RGB, Depth, and Thermal Imagery
Aug 01, 2025Robot navigation in unstructured environments requires multimodal perception systems that can support safe navigation. Multimodality enables the integration of complementary information collected by different sensors. However, this information must be processed by machine learning algorithms specifically designed to leverage heterogeneous data. Furthermore, it is necessary to identify which sensor modalities are most informative for navigation in the target environment. In Martian exploration, thermal imagery has proven valuable for assessing terrain safety due to differences in thermal behaviour between soil types. This work presents OmniUnet, a transformer-based neural network architecture for semantic segmentation using RGB, depth, and thermal (RGB-D-T) imagery. A custom multimodal sensor housing was developed using 3D printing and mounted on the Martian Rover Testbed for Autonomy (MaRTA) to collect a multimodal dataset in the Bardenas semi-desert in northern Spain. This location serves as a representative environment of the Martian surface, featuring terrain types such as sand, bedrock, and compact soil. A subset of this dataset was manually labeled to support supervised training of the network. The model was evaluated both quantitatively and qualitatively, achieving a pixel accuracy of 80.37% and demonstrating strong performance in segmenting complex unstructured terrain. Inference tests yielded an average prediction time of 673 ms on a resource-constrained computer (Jetson Orin Nano), confirming its suitability for on-robot deployment. The software implementation of the network and the labeled dataset have been made publicly available to support future research in multimodal terrain perception for planetary robotics.
Mobility Strategy of Multi-Limbed Climbing Robots for Asteroid Exploration
Jun 22, 2023



Mobility on asteroids by multi-limbed climbing robots is expected to achieve our exploration goals in such challenging environments. We propose a mobility strategy to improve the locomotion safety of climbing robots in such harsh environments that picture extremely low gravity and highly uneven terrain. Our method plans the gait by decoupling the base and limbs' movements and adjusting the main body pose to avoid ground collisions. The proposed approach includes a motion planning that reduces the reactions generated by the robot's movement by optimizing the swinging trajectory and distributing the momentum. Lower motion reactions decrease the pulling forces on the grippers, avoiding the slippage and flotation of the robot. Dynamic simulations and experiments demonstrate that the proposed method could improve the robot's mobility on the surface of asteroids.
Maximum Likelihood Uncertainty Estimation: Robustness to Outliers
Feb 03, 2022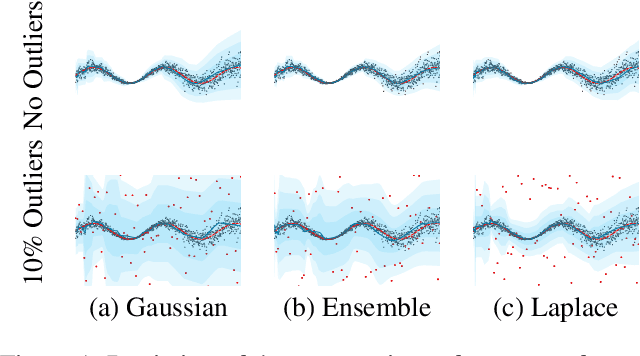

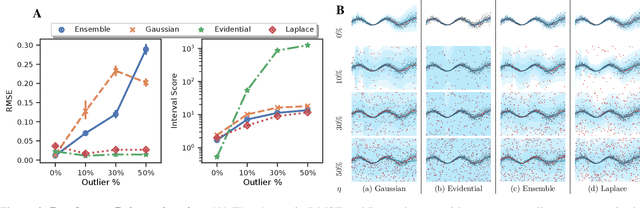
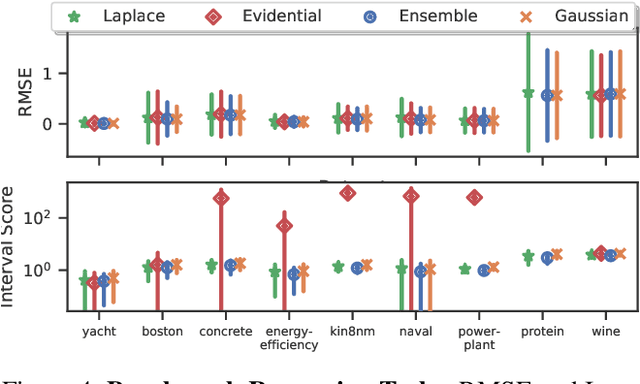
We benchmark the robustness of maximum likelihood based uncertainty estimation methods to outliers in training data for regression tasks. Outliers or noisy labels in training data results in degraded performances as well as incorrect estimation of uncertainty. We propose the use of a heavy-tailed distribution (Laplace distribution) to improve the robustness to outliers. This property is evaluated using standard regression benchmarks and on a high-dimensional regression task of monocular depth estimation, both containing outliers. In particular, heavy-tailed distribution based maximum likelihood provides better uncertainty estimates, better separation in uncertainty for out-of-distribution data, as well as better detection of adversarial attacks in the presence of outliers.
Detection of Binary Square Fiducial Markers Using an Event Camera
Jan 19, 2021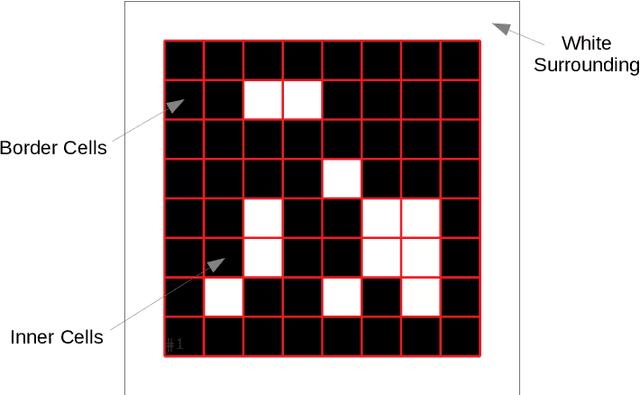
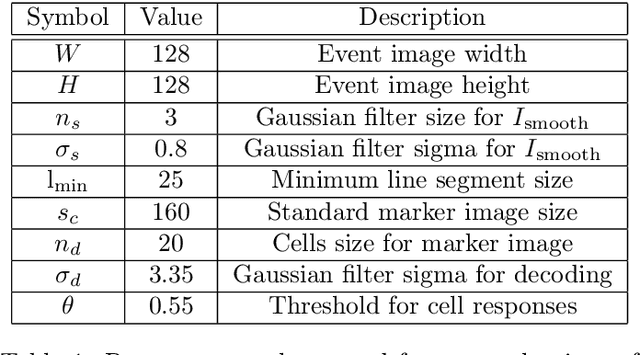
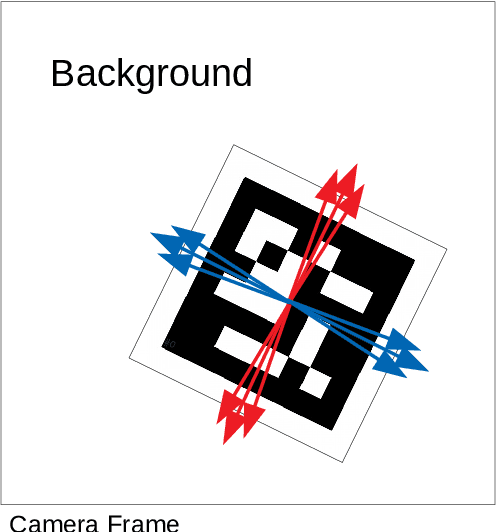
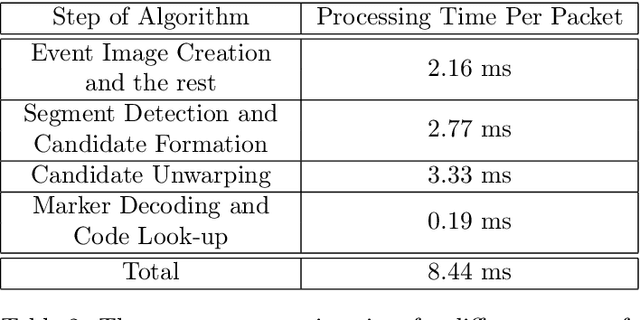
Event cameras are a new type of image sensors that output changes in light intensity (events) instead of absolute intensity values. They have a very high temporal resolution and a high dynamic range. In this paper, we propose a method to detect and decode binary square markers using an event camera. We detect the edges of the markers by detecting line segments in an image created from events in the current packet. The line segments are combined to form marker candidates. The bit value of marker cells is decoded using the events on their borders. To the best of our knowledge, no other approach exists for detecting square binary markers directly from an event camera. Experimental results show that the performance of our proposal is much superior to the one from the RGB ArUco marker detector. Additionally, the proposed method can run on a single CPU thread in real-time.
A Real-Time Approach for Chance-Constrained Motion Planning with Dynamic Obstacles
Jan 22, 2020
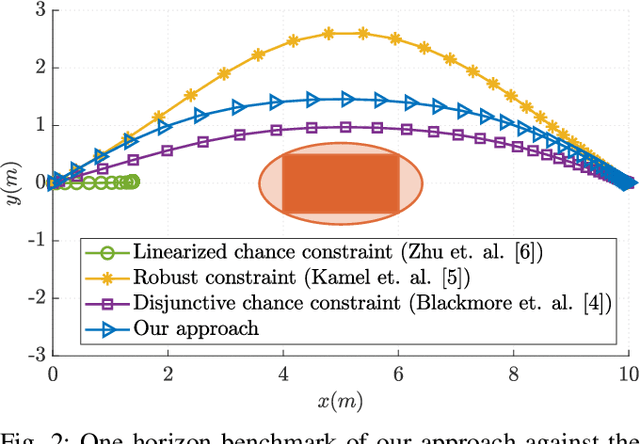

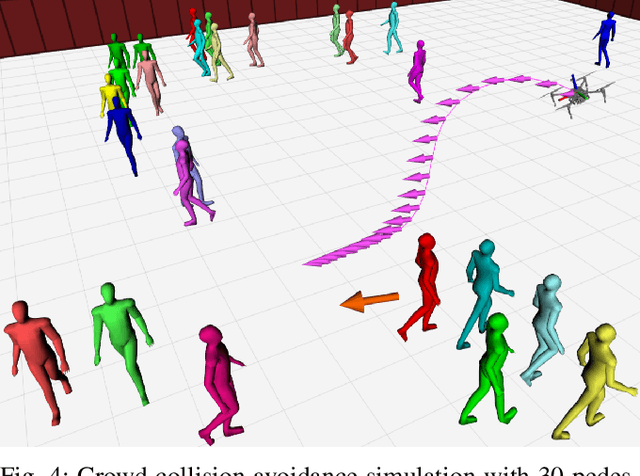
Uncertain dynamic obstacles, such as pedestrians or vehicles, pose a major challenge for optimal robot navigation with safety guarantees. Previous work on motion planning has followed two main strategies to provide a safe bound on an obstacle's space: a polyhedron, such as a cuboid, or a nonlinear differentiable surface, such as an ellipsoid. The former approach relies on disjunctive programming, which has a relatively high computational cost that grows exponentially with the number of obstacles. The latter approach needs to be linearized locally to find a tractable evaluation of the chance constraints, which dramatically reduces the remaining free space and leads to over-conservative trajectories or even unfeasibility. In this work, we present a hybrid approach that eludes the pitfalls of both strategies while maintaining the original safety guarantees. The key idea consists in obtaining a safe differentiable approximation for the disjunctive chance constraints bounding the obstacles. The resulting nonlinear optimization problem is free of chance constraint linearization and disjunctive programming, and therefore, it can be efficiently solved to meet fast real-time requirements with multiple obstacles. We validate our approach through mathematical proof, simulation and real experiments with an aerial robot using nonlinear model predictive control to avoid pedestrians.