 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHyperspectral and LiDAR data for the prediction via machine learning of tree species, volume and biomass: a possible contribution for updating forest management plans
Sep 30, 2022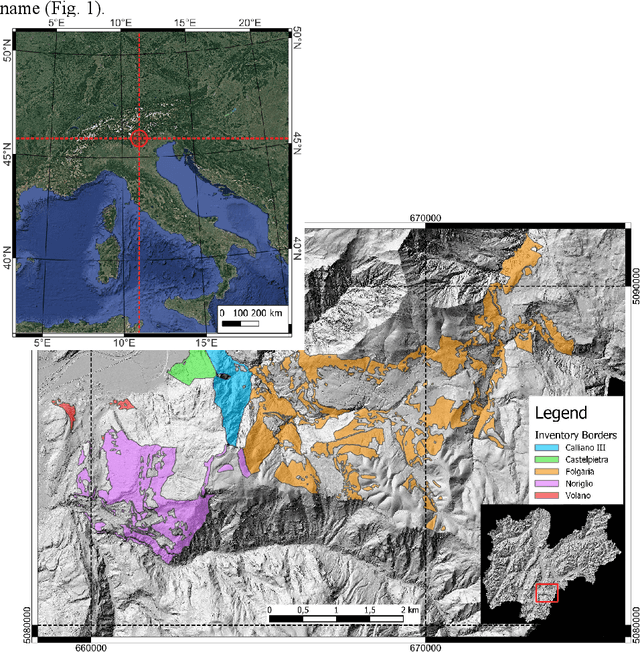
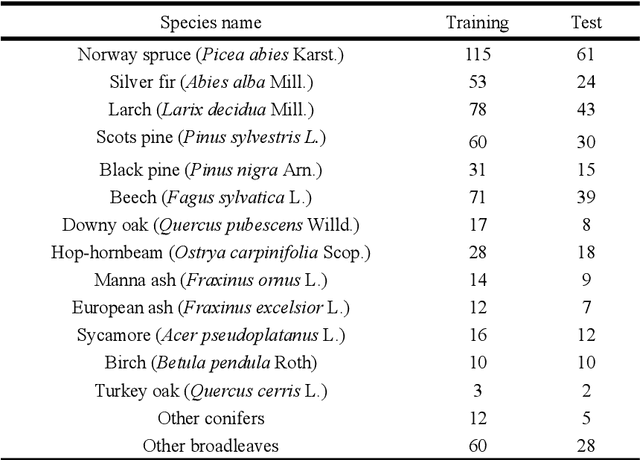

This work intends to lay the foundations for identifying the prevailing forest types and the delineation of forest units within private forest inventories in the Autonomous Province of Trento (PAT), using currently available remote sensing solutions. In particular, data from LiDAR and hyperspectral surveys of 2014 made available by PAT were acquired and processed. Such studies are very important in the context of forest management scenarios. The method includes defining tree species ground-truth by outlining single tree crowns with polygons and labeling them. Successively two supervised machine learning classifiers, K-Nearest Neighborhood and Support Vector Machine (SVM) were used. The results show that, by setting specific hyperparameters, the SVM methodology gave the best results in classification of tree species. Biomass was estimated using canopy parameters and the Jucker equation for the above ground biomass (AGB) and that of Scrinzi for the tariff volume. Predicted values were compared with 11 field plots of fixed radius where volume and biomass were field-estimated in 2017. Results show significant coefficients of correlation: 0.94 for stem volume and 0.90 for total aboveground tree biomass.
A graph cut approach to 3D tree delineation, using integrated airborne LiDAR and hyperspectral imagery
Jan 24, 2017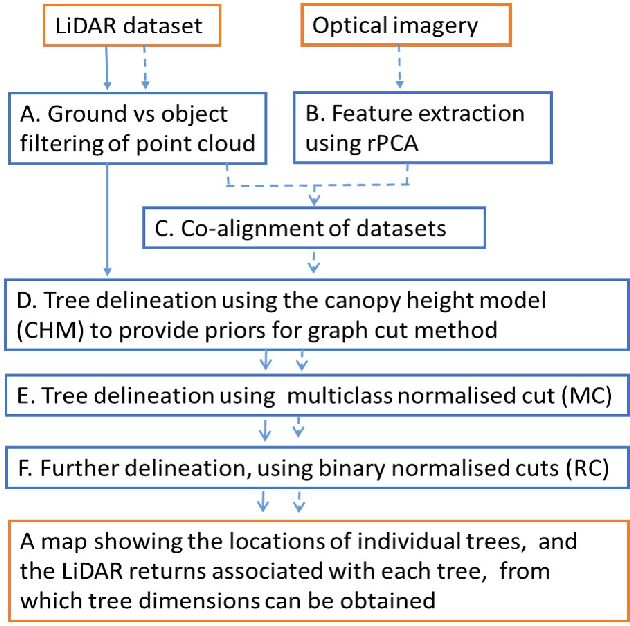
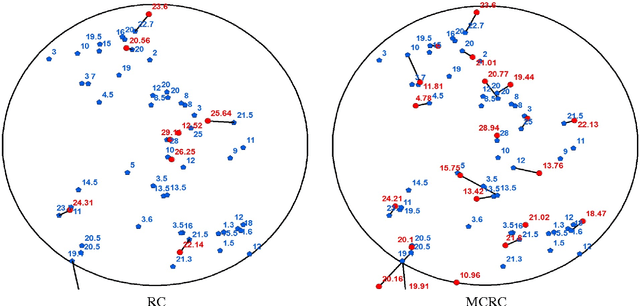

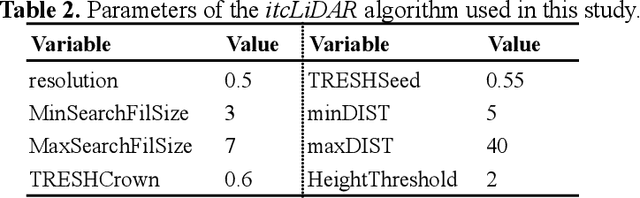
Recognising individual trees within remotely sensed imagery has important applications in forest ecology and management. Several algorithms for tree delineation have been suggested, mostly based on locating local maxima or inverted basins in raster canopy height models (CHMs) derived from Light Detection And Ranging (LiDAR) data or photographs. However, these algorithms often lead to inaccurate estimates of forest stand characteristics due to the limited information content of raster CHMs. Here we develop a 3D tree delineation method which uses graph cut to delineate trees from the full 3D LiDAR point cloud, and also makes use of any optical imagery available (hyperspectral imagery in our case). First, conventional methods are used to locate local maxima in the CHM and generate an initial map of trees. Second, a graph is built from the LiDAR point cloud, fused with the hyperspectral data. For computational efficiency, the feature space of hyperspectral imagery is reduced using robust PCA. Third, a multi-class normalised cut is applied to the graph, using the initial map of trees to constrain the number of clusters and their locations. Finally, recursive normalised cut is used to subdivide, if necessary, each of the clusters identified by the initial analysis. We call this approach Multiclass Cut followed by Recursive Cut (MCRC). The effectiveness of MCRC was tested using three datasets: i) NewFor, ii) a coniferous forest in the Italian Alps, and iii) a deciduous woodland in the UK. The performance of MCRC was usually superior to that of other delineation methods, and was further improved by including high-resolution optical imagery. Since MCRC delineates the entire LiDAR point cloud in 3D, it allows individual crown characteristics to be measured. By making full use of the data available, graph cut has the potential to considerably improve the accuracy of tree delineation.