 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeClassifier Ensemble for Efficient Uncertainty Calibration of Deep Neural Networks for Image Classification
Jan 17, 2025



This paper investigates novel classifier ensemble techniques for uncertainty calibration applied to various deep neural networks for image classification. We evaluate both accuracy and calibration metrics, focusing on Expected Calibration Error (ECE) and Maximum Calibration Error (MCE). Our work compares different methods for building simple yet efficient classifier ensembles, including majority voting and several metamodel-based approaches. Our evaluation reveals that while state-of-the-art deep neural networks for image classification achieve high accuracy on standard datasets, they frequently suffer from significant calibration errors. Basic ensemble techniques like majority voting provide modest improvements, while metamodel-based ensembles consistently reduce ECE and MCE across all architectures. Notably, the largest of our compared metamodels demonstrate the most substantial calibration improvements, with minimal impact on accuracy. Moreover, classifier ensembles with metamodels outperform traditional model ensembles in calibration performance, while requiring significantly fewer parameters. In comparison to traditional post-hoc calibration methods, our approach removes the need for a separate calibration dataset. These findings underscore the potential of our proposed metamodel-based classifier ensembles as an efficient and effective approach to improving model calibration, thereby contributing to more reliable deep learning systems.
RadarPillars: Efficient Object Detection from 4D Radar Point Clouds
Aug 09, 2024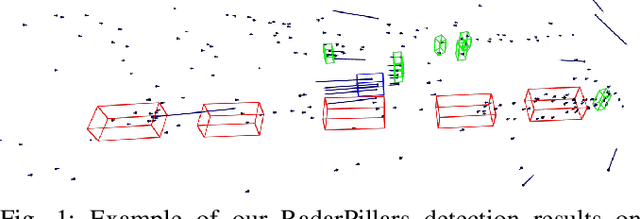
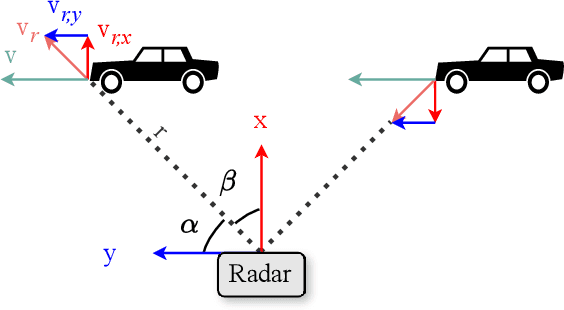
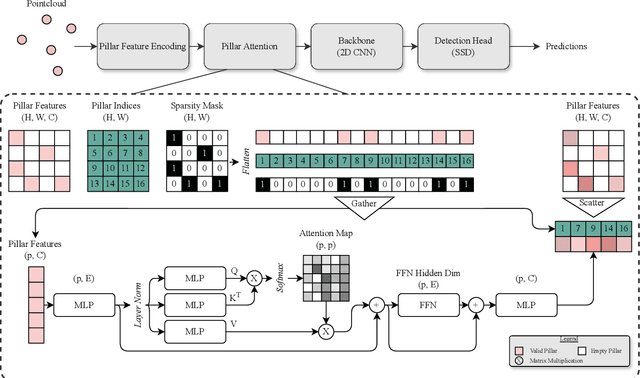
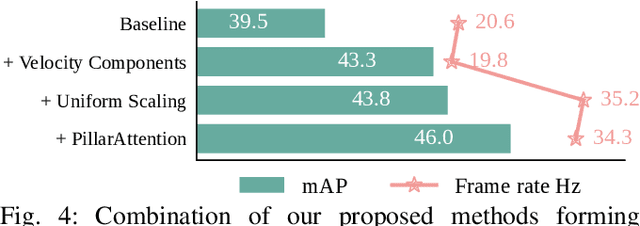
Automotive radar systems have evolved to provide not only range, azimuth and Doppler velocity, but also elevation data. This additional dimension allows for the representation of 4D radar as a 3D point cloud. As a result, existing deep learning methods for 3D object detection, which were initially developed for LiDAR data, are often applied to these radar point clouds. However, this neglects the special characteristics of 4D radar data, such as the extreme sparsity and the optimal utilization of velocity information. To address these gaps in the state-of-the-art, we present RadarPillars, a pillar-based object detection network. By decomposing radial velocity data, introducing PillarAttention for efficient feature extraction, and studying layer scaling to accommodate radar sparsity, RadarPillars significantly outperform state-of-the-art detection results on the View-of-Delft dataset. Importantly, this comes at a significantly reduced parameter count, surpassing existing methods in terms of efficiency and enabling real-time performance on edge devices.
The Person Index Challenge: Extraction of Persons from Messy, Short Texts
Nov 16, 2020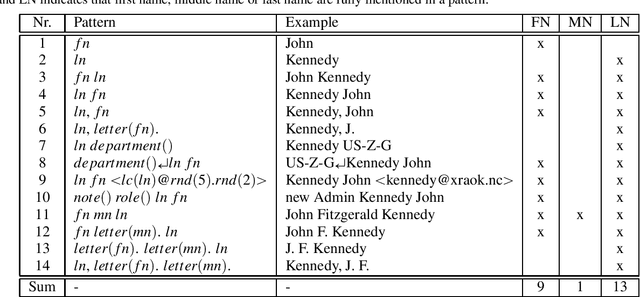
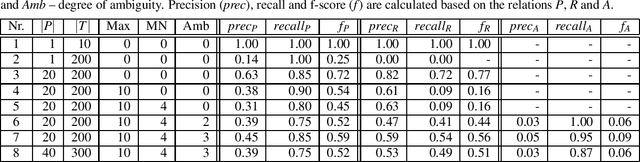
When persons are mentioned in texts with their first name, last name and/or middle names, there can be a high variation which of their names are used, how their names are ordered and if their names are abbreviated. If multiple persons are mentioned consecutively in very different ways, especially short texts can be perceived as "messy". Once ambiguous names occur, associations to persons may not be inferred correctly. Despite these eventualities, in this paper we ask how well an unsupervised algorithm can build a person index from short texts. We define a person index as a structured table that distinctly catalogs individuals by their names. First, we give a formal definition of the problem and describe a procedure to generate ground truth data for future evaluations. To give a first solution to this challenge, a baseline approach is implemented. By using our proposed evaluation strategy, we test the performance of the baseline and suggest further improvements. For future research the source code is publicly available.