 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmbracing Background Knowledge in the Analysis of Actual Causality: An Answer Set Programming Approach
Jun 06, 2023

This paper presents a rich knowledge representation language aimed at formalizing causal knowledge. This language is used for accurately and directly formalizing common benchmark examples from the literature of actual causality. A definition of cause is presented and used to analyze the actual causes of changes with respect to sequences of actions representing those examples.
Thirty years of Epistemic Specifications
Aug 17, 2021
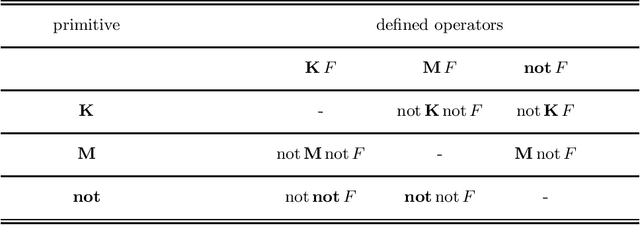
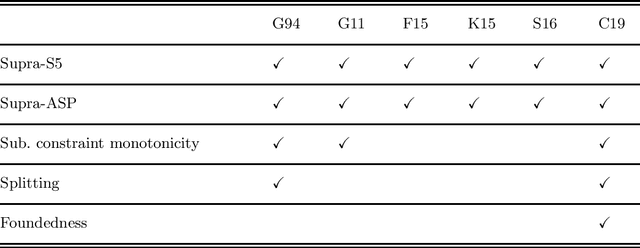
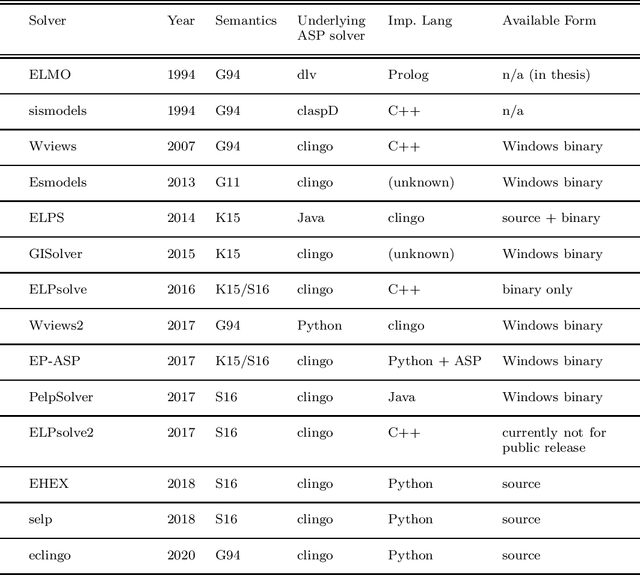
The language of epistemic specifications and epistemic logic programs extends disjunctive logic programs under the stable model semantics with modal constructs called subjective literals. Using subjective literals, it is possible to check whether a regular literal is true in every or some stable models of the program, those models, in this context also called \emph{belief sets}, being collected in a set called world view. This allows for representing, within the language, whether some proposition should be understood accordingly to the open or the closed world assumption. Several attempts for capturing the intuitions underlying the language by means of a formal semantics were given, resulting in a multitude of proposals that makes it difficult to understand the current state of the art. In this paper, we provide an overview of the inception of the field and the knowledge representation and reasoning tasks it is suitable for. We also provide a detailed analysis of properties of proposed semantics, and an outlook of challenges to be tackled by future research in the area. Under consideration in Theory and Practice of Logic Programming (TPLP)
REBA: A Refinement-Based Architecture for Knowledge Representation and Reasoning in Robotics
Sep 21, 2018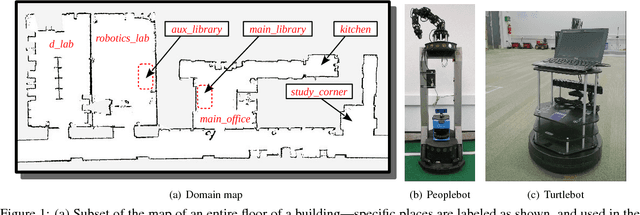
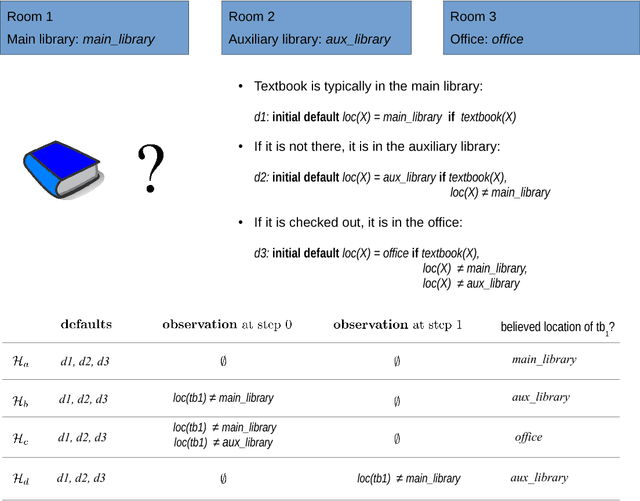
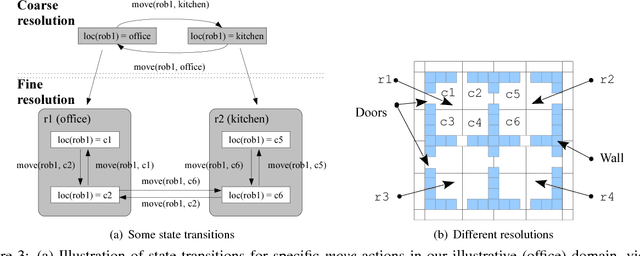
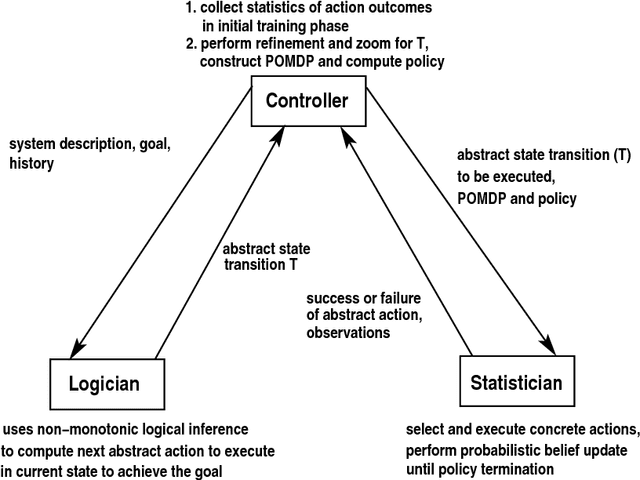
This paper describes an architecture for robots that combines the complementary strengths of probabilistic graphical models and declarative programming to represent and reason with logic-based and probabilistic descriptions of uncertainty and domain knowledge. An action language is extended to support non-boolean fluents and non-deterministic causal laws. This action language is used to describe tightly-coupled transition diagrams at two levels of granularity, with a fine-resolution transition diagram defined as a refinement of a coarse-resolution transition diagram of the domain. The coarse-resolution system description, and a history that includes (prioritized) defaults, are translated into an Answer Set Prolog (ASP) program. For any given goal, inference in the ASP program provides a plan of abstract actions. To implement each such abstract action, the robot automatically zooms to the part of the fine-resolution transition diagram relevant to this action. A probabilistic representation of the uncertainty in sensing and actuation is then included in this zoomed fine-resolution system description, and used to construct a partially observable Markov decision process (POMDP). The policy obtained by solving the POMDP is invoked repeatedly to implement the abstract action as a sequence of concrete actions, with the corresponding observations being recorded in the coarse-resolution history and used for subsequent reasoning. The architecture is evaluated in simulation and on a mobile robot moving objects in an indoor domain, to show that it supports reasoning with violation of defaults, noisy observations and unreliable actions, in complex domains.
Vicious Circle Principle and Logic Programs with Aggregates
Aug 21, 2018The paper presents a knowledge representation language $\mathcal{A}log$ which extends ASP with aggregates. The goal is to have a language based on simple syntax and clear intuitive and mathematical semantics. We give some properties of $\mathcal{A}log$, an algorithm for computing its answer sets, and comparison with other approaches.
Vicious Circle Principle and Formation of Sets in ASP Based Languages
Aug 29, 2016The paper continues the investigation of Poincare and Russel's Vicious Circle Principle (VCP) in the context of the design of logic programming languages with sets. We expand previously introduced language Alog with aggregates by allowing infinite sets and several additional set related constructs useful for knowledge representation and teaching. In addition, we propose an alternative formalization of the original VCP and incorporate it into the semantics of new language, Slog+, which allows more liberal construction of sets and their use in programming rules. We show that, for programs without disjunction and infinite sets, the formal semantics of aggregates in Slog+ coincides with that of several other known languages. Their intuitive and formal semantics, however, are based on quite different ideas and seem to be more involved than that of Slog+.
Modular Action Language ALM
Jul 17, 2015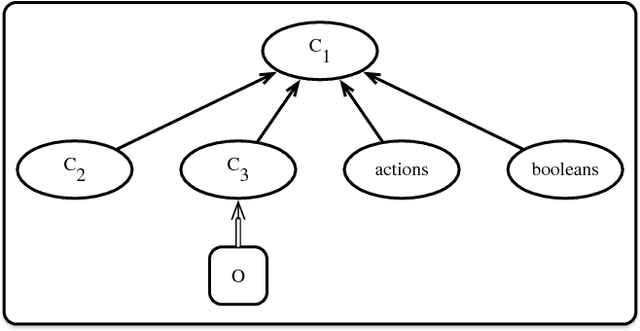
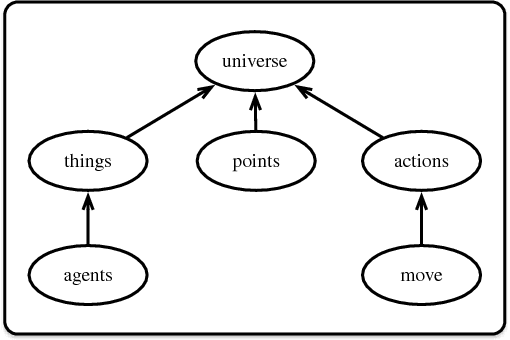
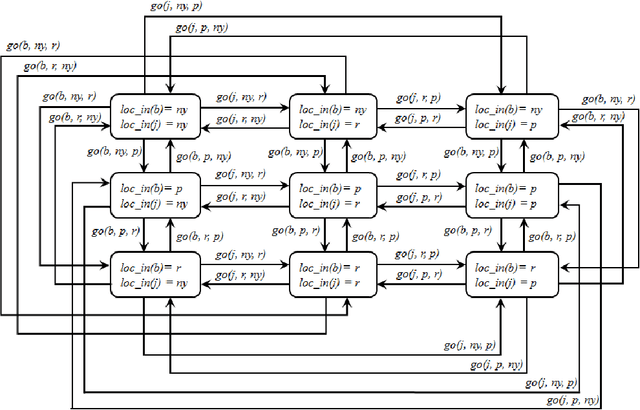
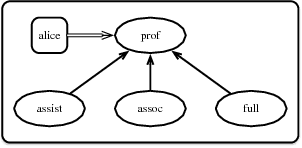
The paper introduces a new modular action language, ALM, and illustrates the methodology of its use. It is based on the approach of Gelfond and Lifschitz (1993; 1998) in which a high-level action language is used as a front end for a logic programming system description. The resulting logic programming representation is used to perform various computational tasks. The methodology based on existing action languages works well for small and even medium size systems, but is not meant to deal with larger systems that require structuring of knowledge. ALM is meant to remedy this problem. Structuring of knowledge in ALM is supported by the concepts of module (a formal description of a specific piece of knowledge packaged as a unit), module hierarchy, and library, and by the division of a system description of ALM into two parts: theory and structure. A theory consists of one or more modules with a common theme, possibly organized into a module hierarchy based on a dependency relation. It contains declarations of sorts, attributes, and properties of the domain together with axioms describing them. Structures are used to describe the domain's objects. These features, together with the means for defining classes of a domain as special cases of previously defined ones, facilitate the stepwise development, testing, and readability of a knowledge base, as well as the creation of knowledge representation libraries. To appear in Theory and Practice of Logic Programming (TPLP).
* 65 pages, 7 figures. To appear in Theory and Practice of Logic Programming (TPLP)
KR$^3$: An Architecture for Knowledge Representation and Reasoning in Robotics
May 05, 2014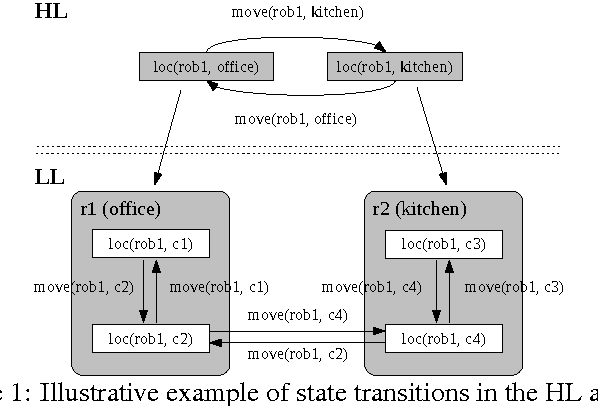
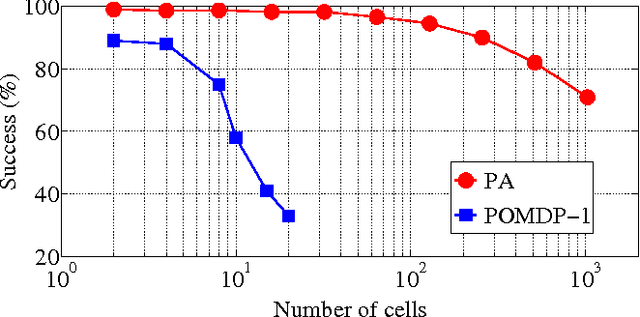
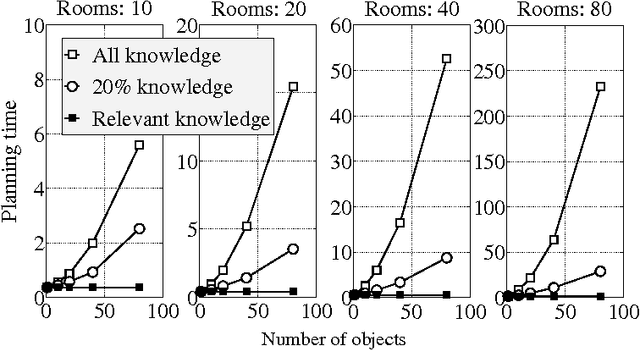
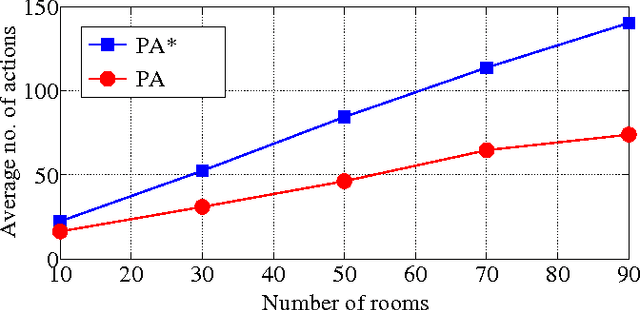
This paper describes an architecture that combines the complementary strengths of declarative programming and probabilistic graphical models to enable robots to represent, reason with, and learn from, qualitative and quantitative descriptions of uncertainty and knowledge. An action language is used for the low-level (LL) and high-level (HL) system descriptions in the architecture, and the definition of recorded histories in the HL is expanded to allow prioritized defaults. For any given goal, tentative plans created in the HL using default knowledge and commonsense reasoning are implemented in the LL using probabilistic algorithms, with the corresponding observations used to update the HL history. Tight coupling between the two levels enables automatic selection of relevant variables and generation of suitable action policies in the LL for each HL action, and supports reasoning with violation of defaults, noisy observations and unreliable actions in large and complex domains. The architecture is evaluated in simulation and on physical robots transporting objects in indoor domains; the benefit on robots is a reduction in task execution time of 39% compared with a purely probabilistic, but still hierarchical, approach.
Language ASP{f} with Arithmetic Expressions and Consistency-Restoring Rules
Jan 08, 2013In this paper we continue the work on our extension of Answer Set Programming by non-Herbrand functions and add to the language support for arithmetic expressions and various inequality relations over non-Herbrand functions, as well as consistency-restoring rules from CR-Prolog. We demonstrate the use of this latest version of the language in the representation of important kinds of knowledge.
SPARC - Sorted ASP with Consistency Restoring Rules
Jan 08, 2013
This is a preliminary report on the work aimed at making CR-Prolog -- a version of ASP with consistency restoring rules -- more suitable for use in teaching and large applications. First we describe a sorted version of CR-Prolog called SPARC. Second, we translate a basic version of the CR-Prolog into the language of DLV and compare the performance with the state of the art CR-Prolog solver. The results form the foundation for future more efficient and user friendly implementation of SPARC and shed some light on the relationship between two useful knowledge representation constructs: consistency restoring rules and weak constraints of DLV.
Probabilistic reasoning with answer sets
Dec 03, 2008
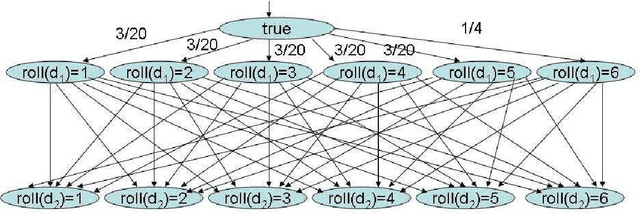
This paper develops a declarative language, P-log, that combines logical and probabilistic arguments in its reasoning. Answer Set Prolog is used as the logical foundation, while causal Bayes nets serve as a probabilistic foundation. We give several non-trivial examples and illustrate the use of P-log for knowledge representation and updating of knowledge. We argue that our approach to updates is more appealing than existing approaches. We give sufficiency conditions for the coherency of P-log programs and show that Bayes nets can be easily mapped to coherent P-log programs.