 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeREBA: A Refinement-Based Architecture for Knowledge Representation and Reasoning in Robotics
Paper and Code
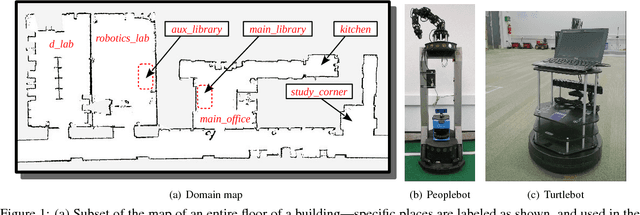
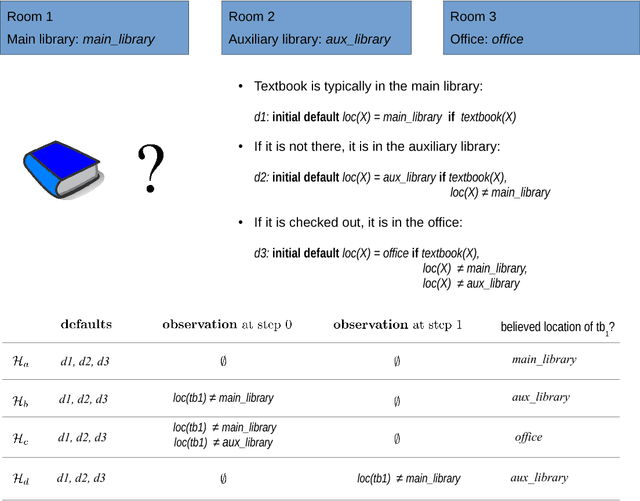
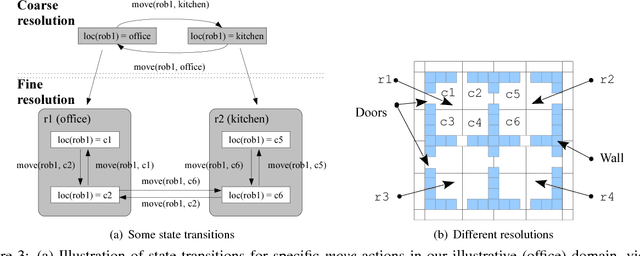
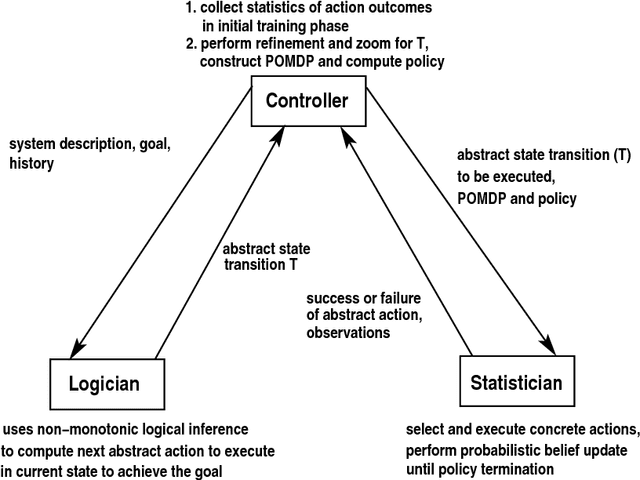
This paper describes an architecture for robots that combines the complementary strengths of probabilistic graphical models and declarative programming to represent and reason with logic-based and probabilistic descriptions of uncertainty and domain knowledge. An action language is extended to support non-boolean fluents and non-deterministic causal laws. This action language is used to describe tightly-coupled transition diagrams at two levels of granularity, with a fine-resolution transition diagram defined as a refinement of a coarse-resolution transition diagram of the domain. The coarse-resolution system description, and a history that includes (prioritized) defaults, are translated into an Answer Set Prolog (ASP) program. For any given goal, inference in the ASP program provides a plan of abstract actions. To implement each such abstract action, the robot automatically zooms to the part of the fine-resolution transition diagram relevant to this action. A probabilistic representation of the uncertainty in sensing and actuation is then included in this zoomed fine-resolution system description, and used to construct a partially observable Markov decision process (POMDP). The policy obtained by solving the POMDP is invoked repeatedly to implement the abstract action as a sequence of concrete actions, with the corresponding observations being recorded in the coarse-resolution history and used for subsequent reasoning. The architecture is evaluated in simulation and on a mobile robot moving objects in an indoor domain, to show that it supports reasoning with violation of defaults, noisy observations and unreliable actions, in complex domains.