 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Control Barrier Functions for Safe Multi-Vehicle Navigation in Heterogeneous USV Fleets
Jan 16, 2026Collision avoidance in heterogeneous fleets of uncrewed vessels is challenging because the decision-making processes and controllers often differ between platforms, and it is further complicated by the limitations on sharing trajectories and control values in real-time. This paper presents a pragmatic approach that addresses these issues by adding a control filter on each autonomous vehicle that assumes worst-case behavior from other contacts, including crewed vessels. This distributed safety control filter is developed using control barrier function (CBF) theory and the application is clearly described to ensure explainability of these safety-critical methods. This work compares the worst-case CBF approach with a Collision Regulations (COLREGS) behavior-based approach in simulated encounters. Real-world experiments with three different uncrewed vessels and a human operated vessel were performed to confirm the approach is effective across a range of platforms and is robust to uncooperative behavior from human operators. Results show that combining both CBF methods and COLREGS behaviors achieves the best safety and efficiency.
Evaluating Collaborative Autonomy in Opposed Environments using Maritime Capture-the-Flag Competitions
Apr 25, 2024



The objective of this work is to evaluate multi-agent artificial intelligence methods when deployed on teams of unmanned surface vehicles (USV) in an adversarial environment. Autonomous agents were evaluated in real-world scenarios using the Aquaticus test-bed, which is a Capture-the-Flag (CTF) style competition involving teams of USV systems. Cooperative teaming algorithms of various foundations in behavior-based optimization and deep reinforcement learning (RL) were deployed on these USV systems in two versus two teams and tested against each other during a competition period in the fall of 2023. Deep reinforcement learning applied to USV agents was achieved via the Pyquaticus test bed, a lightweight gymnasium environment that allows simulated CTF training in a low-level environment. The results of the experiment demonstrate that rule-based cooperation for behavior-based agents outperformed those trained in Deep-reinforcement learning paradigms as implemented in these competitions. Further integration of the Pyquaticus gymnasium environment for RL with MOOS-IvP in terms of configuration and control schema will allow for more competitive CTF games in future studies. As the development of experimental deep RL methods continues, the authors expect that the competitive gap between behavior-based autonomy and deep RL will be reduced. As such, this report outlines the overall competition, methods, and results with an emphasis on future works such as reward shaping and sim-to-real methodologies and extending rule-based cooperation among agents to react to safety and security events in accordance with human experts intent/rules for executing safety and security processes.
Morpheus: An A-sized AUV with morphing fins and algorithms for agile maneuvering
Dec 22, 2022



We designed and constructed an A-sized base autonomous underwater vehicle (AUV), augmented with a stack of modular and extendable hardware and software, including autonomy, navigation, control and high fidelity simulation capabilities (A-size stands for the standard sonobuoy form factor, with a maximum diameter of 124 mm). Subsequently, we extended this base vehicle with a novel tuna-inspired morphing fin payload module (referred to as the Morpheus AUV), to achieve good directional stability and exceptional maneuverability; properties that are highly desirable for rigid hull AUVs, but are presently difficult to achieve because they impose contradictory requirements. The morphing fin payload allows the base AUV to dynamically change its stability-maneuverability qualities by using morphing fins, which can be deployed, deflected and retracted, as needed. The base vehicle and Morpheus AUV were both extensively field tested in-water in the Charles river, Massachusetts, USA; by conducting hundreds of hours of operations over a period of two years. The maneuvering capability of the Morpheus AUV was evaluated with and without the use of morphing fins to quantify the performance improvement. The Morpheus AUV was able to showcase an exceptional turning rate of around 25-35 deg/s. A maximum turn rate improvement of around 35% - 50% was gained through the use of morphing fins.
MassMIND: Massachusetts Maritime INfrared Dataset
Sep 09, 2022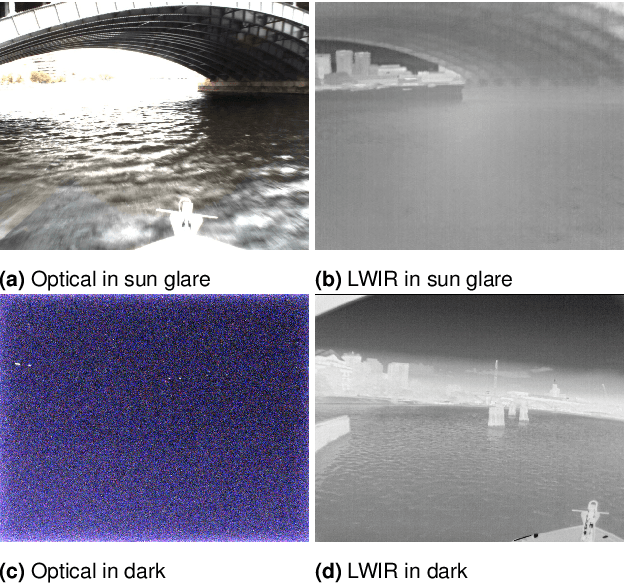

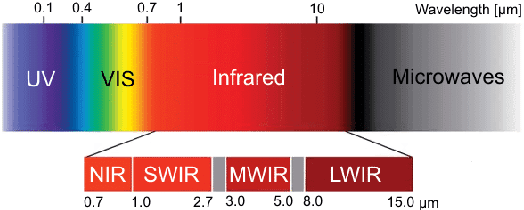
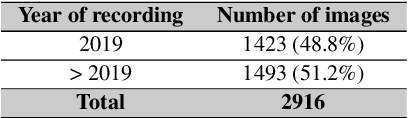
Recent advances in deep learning technology have triggered radical progress in the autonomy of ground vehicles. Marine coastal Autonomous Surface Vehicles (ASVs) that are regularly used for surveillance, monitoring and other routine tasks can benefit from this autonomy. Long haul deep sea transportation activities are additional opportunities. These two use cases present very different terrains -- the first being coastal waters -- with many obstacles, structures and human presence while the latter is mostly devoid of such obstacles. Variations in environmental conditions are common to both terrains. Robust labeled datasets mapping such terrains are crucial in improving the situational awareness that can drive autonomy. However, there are only limited such maritime datasets available and these primarily consist of optical images. Although, Long Wave Infrared (LWIR) is a strong complement to the optical spectrum that helps in extreme light conditions, a labeled public dataset with LWIR images does not currently exist. In this paper, we fill this gap by presenting a labeled dataset of over 2,900 LWIR segmented images captured in coastal maritime environment under diverse conditions. The images are labeled using instance segmentation and classified in seven categories -- sky, water, obstacle, living obstacle, bridge, self and background. We also evaluate this dataset across three deep learning architectures (UNet, PSPNet, DeepLabv3) and provide detailed analysis of its efficacy. While the dataset focuses on the coastal terrain it can equally help deep sea use cases. Such terrain would have less traffic, and the classifier trained on cluttered environment would be able to handle sparse scenes effectively. We share this dataset with the research community with the hope that it spurs new scene understanding capabilities in the maritime environment.