 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic selection of the best neural architecture for time series forecasting via multi-objective optimization and Pareto optimality conditions
Jan 21, 2025Time series forecasting plays a pivotal role in a wide range of applications, including weather prediction, healthcare, structural health monitoring, predictive maintenance, energy systems, and financial markets. While models such as LSTM, GRU, Transformers, and State-Space Models (SSMs) have become standard tools in this domain, selecting the optimal architecture remains a challenge. Performance comparisons often depend on evaluation metrics and the datasets under analysis, making the choice of a universally optimal model controversial. In this work, we introduce a flexible automated framework for time series forecasting that systematically designs and evaluates diverse network architectures by integrating LSTM, GRU, multi-head Attention, and SSM blocks. Using a multi-objective optimization approach, our framework determines the number, sequence, and combination of blocks to align with specific requirements and evaluation objectives. From the resulting Pareto-optimal architectures, the best model for a given context is selected via a user-defined preference function. We validate our framework across four distinct real-world applications. Results show that a single-layer GRU or LSTM is usually optimal when minimizing training time alone. However, when maximizing accuracy or balancing multiple objectives, the best architectures are often composite designs incorporating multiple block types in specific configurations. By employing a weighted preference function, users can resolve trade-offs between objectives, revealing novel, context-specific optimal architectures. Our findings underscore that no single neural architecture is universally optimal for time series forecasting. Instead, the best-performing model emerges as a data-driven composite architecture tailored to user-defined criteria and evaluation objectives.
Morpheus: An A-sized AUV with morphing fins and algorithms for agile maneuvering
Dec 22, 2022



We designed and constructed an A-sized base autonomous underwater vehicle (AUV), augmented with a stack of modular and extendable hardware and software, including autonomy, navigation, control and high fidelity simulation capabilities (A-size stands for the standard sonobuoy form factor, with a maximum diameter of 124 mm). Subsequently, we extended this base vehicle with a novel tuna-inspired morphing fin payload module (referred to as the Morpheus AUV), to achieve good directional stability and exceptional maneuverability; properties that are highly desirable for rigid hull AUVs, but are presently difficult to achieve because they impose contradictory requirements. The morphing fin payload allows the base AUV to dynamically change its stability-maneuverability qualities by using morphing fins, which can be deployed, deflected and retracted, as needed. The base vehicle and Morpheus AUV were both extensively field tested in-water in the Charles river, Massachusetts, USA; by conducting hundreds of hours of operations over a period of two years. The maneuvering capability of the Morpheus AUV was evaluated with and without the use of morphing fins to quantify the performance improvement. The Morpheus AUV was able to showcase an exceptional turning rate of around 25-35 deg/s. A maximum turn rate improvement of around 35% - 50% was gained through the use of morphing fins.
Learning functionals via LSTM neural networks for predicting vessel dynamics in extreme sea states
Dec 23, 2019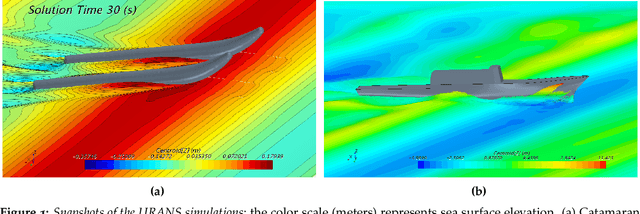



Predicting motions of vessels in extreme sea states represents one of the most challenging problems in naval hydrodynamics. It involves computing complex nonlinear wave-body interactions, hence taxing heavily computational resources. Here, we put forward a new simulation paradigm by training recurrent type neural networks (RNNs) that take as input the stochastic wave elevation at a certain sea state and output the main vessel motions, e.g., pitch, heave and roll. We first compare the performance of standard RNNs versus GRU and LSTM neural networks (NNs) and show that LSTM NNs lead to the best performance. We then examine the testing error of two representative vessels, a catamaran in sea state 1 and a battleship in sea state 8. We demonstrate that good accuracy is achieved for both cases in predicting the vessel motions for unseen wave elevations. We train the NNs with expensive CFD simulations offline, but upon training, the prediction of the vessel dynamics online can be obtained at a fraction of a second. This work is motivated by the universal approximation theorem for functionals [1], and it is the first implementation of such theory to realistic engineering problems.