Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTJ4DRadSet: A 4D Radar Dataset for Autonomous Driving
Apr 30, 2022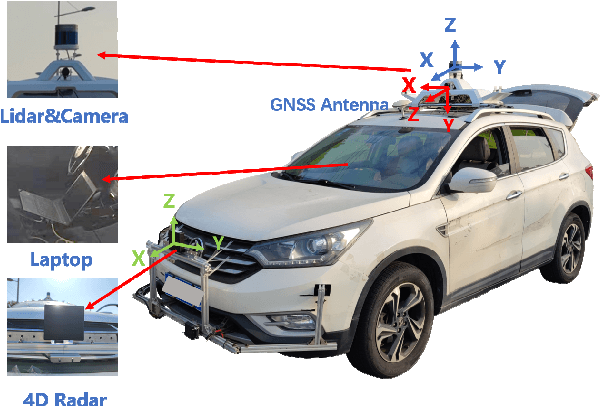
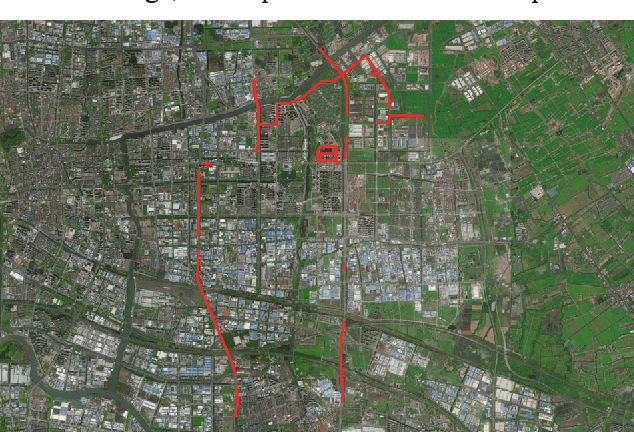
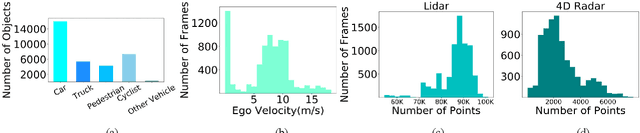

The new generation of 4D high-resolution imaging radar provides not only a huge amount of point cloud but also additional elevation measurement, which has a great potential of 3D sensing in autonomous driving. In this paper, we introduce an autonomous driving dataset named TJ4DRadSet, including multi-modal sensors that are 4D radar, lidar, camera and GNSS, with about 40K frames in total. 7757 frames within 44 consecutive sequences in various driving scenarios are well annotated with 3D bounding boxes and track id. We provide a 4D radar-based 3D object detection baseline for our dataset to demonstrate the effectiveness of deep learning methods for 4D radar point clouds.
Via