 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Disentanglement of a Few Factors at a Time
Oct 26, 2020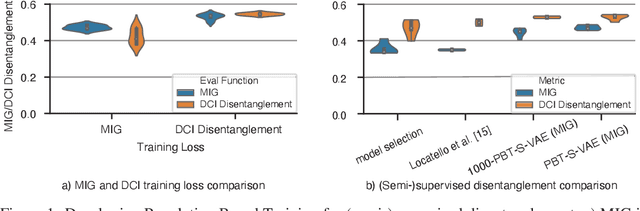

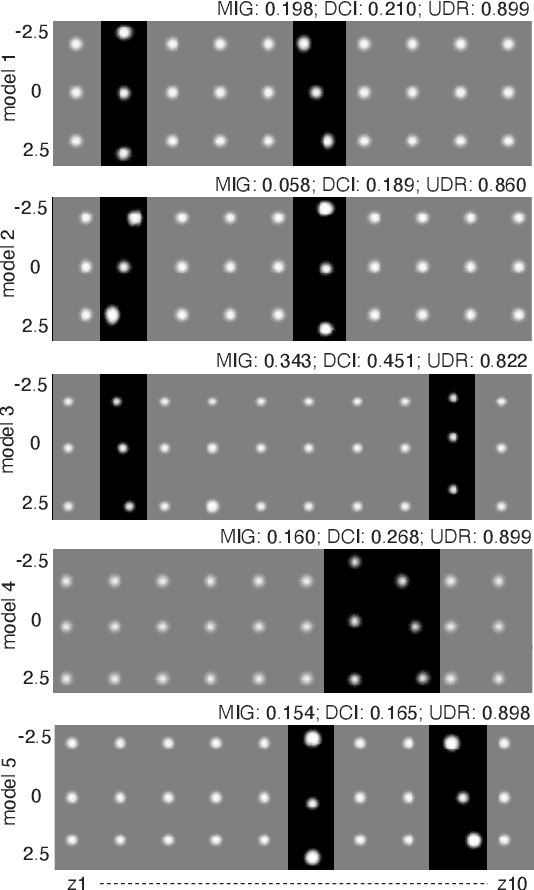

Disentanglement is at the forefront of unsupervised learning, as disentangled representations of data improve generalization, interpretability, and performance in downstream tasks. Current unsupervised approaches remain inapplicable for real-world datasets since they are highly variable in their performance and fail to reach levels of disentanglement of (semi-)supervised approaches. We introduce population-based training (PBT) for improving consistency in training variational autoencoders (VAEs) and demonstrate the validity of this approach in a supervised setting (PBT-VAE). We then use Unsupervised Disentanglement Ranking (UDR) as an unsupervised heuristic to score models in our PBT-VAE training and show how models trained this way tend to consistently disentangle only a subset of the generative factors. Building on top of this observation we introduce the recursive rPU-VAE approach. We train the model until convergence, remove the learned factors from the dataset and reiterate. In doing so, we can label subsets of the dataset with the learned factors and consecutively use these labels to train one model that fully disentangles the whole dataset. With this approach, we show striking improvement in state-of-the-art unsupervised disentanglement performance and robustness across multiple datasets and metrics.
Magnetic-Visual Sensor Fusion-based Dense 3D Reconstruction and Localization for Endoscopic Capsule Robots
Mar 02, 2018
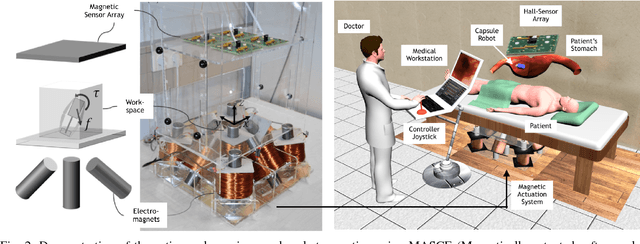

Reliable and real-time 3D reconstruction and localization functionality is a crucial prerequisite for the navigation of actively controlled capsule endoscopic robots as an emerging, minimally invasive diagnostic and therapeutic technology for use in the gastrointestinal (GI) tract. In this study, we propose a fully dense, non-rigidly deformable, strictly real-time, intraoperative map fusion approach for actively controlled endoscopic capsule robot applications which combines magnetic and vision-based localization, with non-rigid deformations based frame-to-model map fusion. The performance of the proposed method is demonstrated using four different ex-vivo porcine stomach models. Across different trajectories of varying speed and complexity, and four different endoscopic cameras, the root mean square surface reconstruction errors 1.58 to 2.17 cm.
Unsupervised Odometry and Depth Learning for Endoscopic Capsule Robots
Mar 02, 2018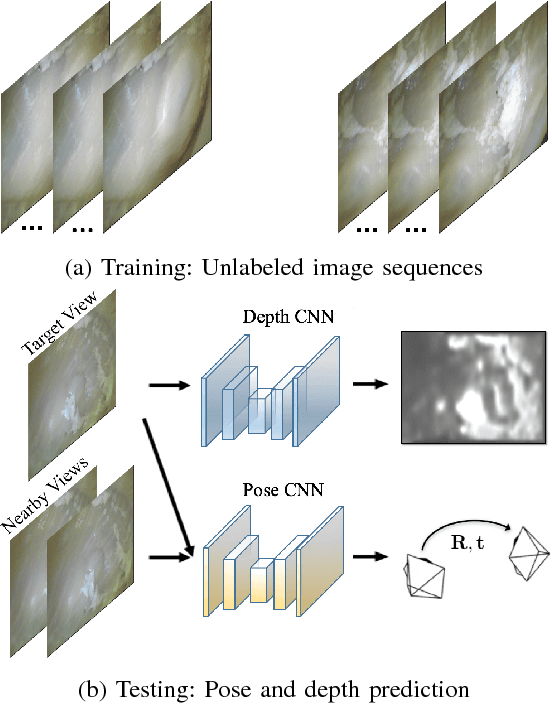
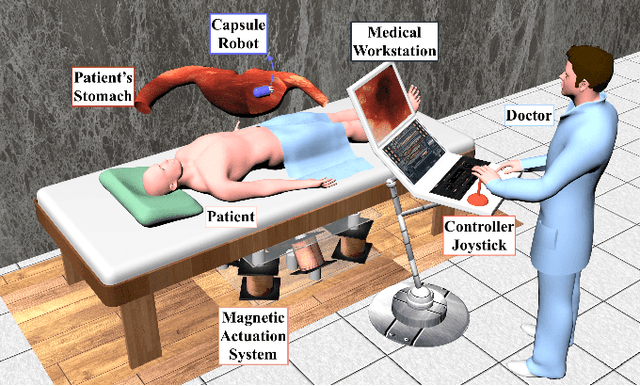
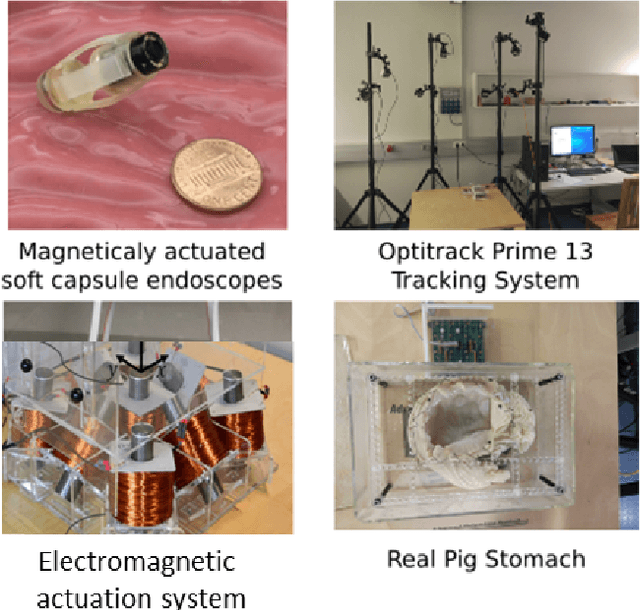
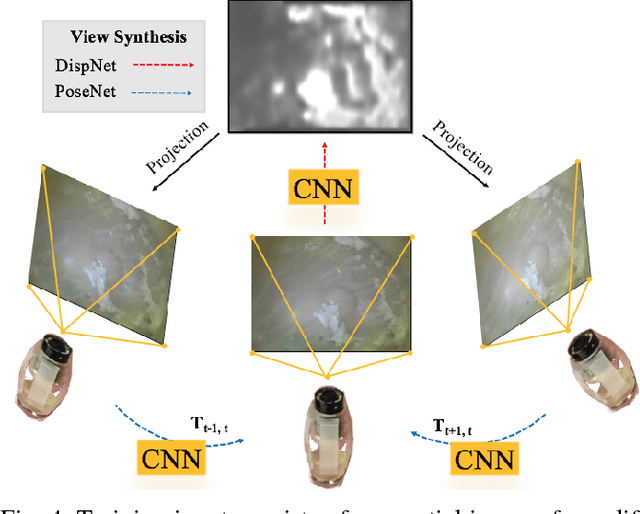
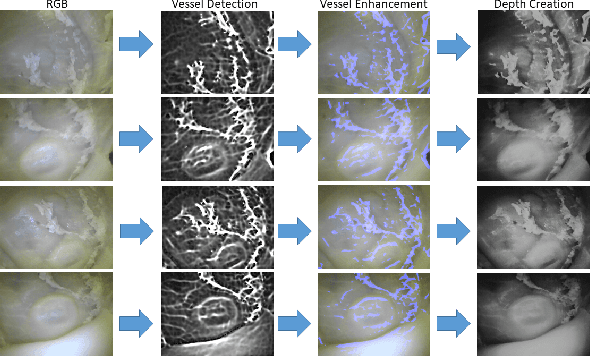
In the last decade, many medical companies and research groups have tried to convert passive capsule endoscopes as an emerging and minimally invasive diagnostic technology into actively steerable endoscopic capsule robots which will provide more intuitive disease detection, targeted drug delivery and biopsy-like operations in the gastrointestinal(GI) tract. In this study, we introduce a fully unsupervised, real-time odometry and depth learner for monocular endoscopic capsule robots. We establish the supervision by warping view sequences and assigning the re-projection minimization to the loss function, which we adopt in multi-view pose estimation and single-view depth estimation network. Detailed quantitative and qualitative analyses of the proposed framework performed on non-rigidly deformable ex-vivo porcine stomach datasets proves the effectiveness of the method in terms of motion estimation and depth recovery.