 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Dynamic Abstract Representations for Sample-Efficient Reinforcement Learning
Oct 04, 2022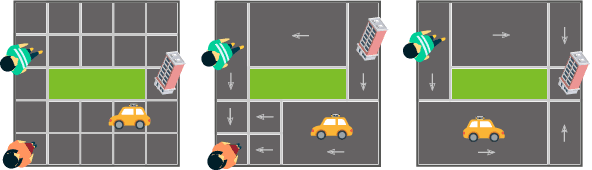
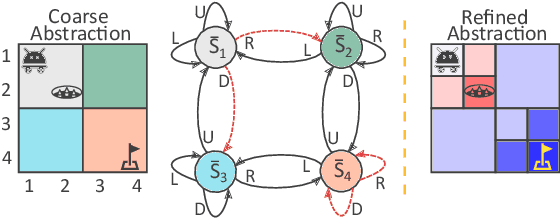
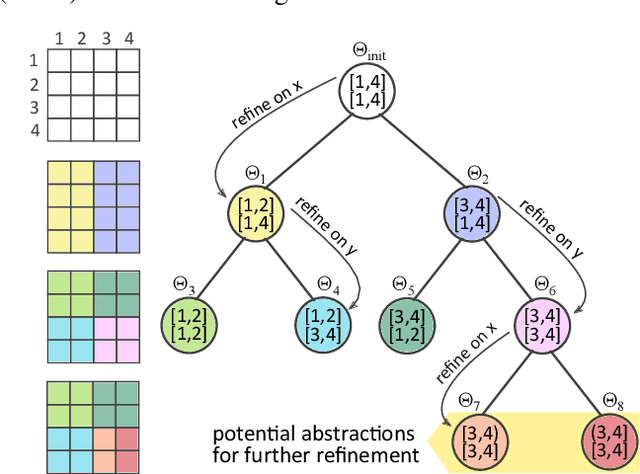
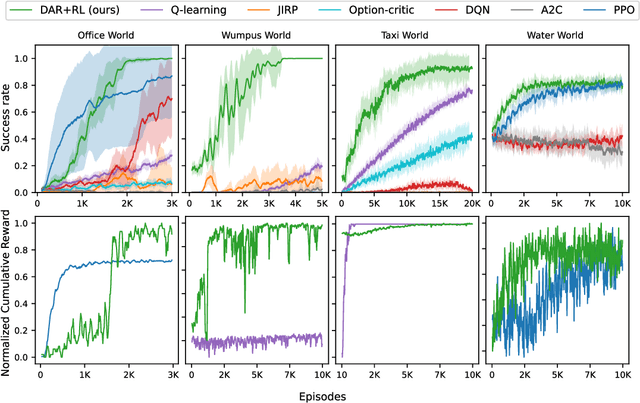
In many real-world problems, the learning agent needs to learn a problem's abstractions and solution simultaneously. However, most such abstractions need to be designed and refined by hand for different problems and domains of application. This paper presents a novel top-down approach for constructing state abstractions while carrying out reinforcement learning. Starting with state variables and a simulator, it presents a novel domain-independent approach for dynamically computing an abstraction based on the dispersion of Q-values in abstract states as the agent continues acting and learning. Extensive empirical evaluation on multiple domains and problems shows that this approach automatically learns abstractions that are finely-tuned to the problem, yield powerful sample efficiency, and result in the RL agent significantly outperforming existing approaches.
Joint Communication and Motion Planning for Cobots
Sep 28, 2021
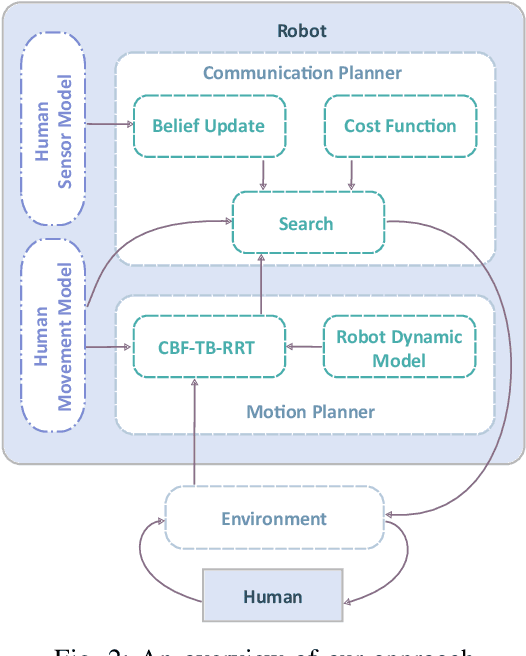
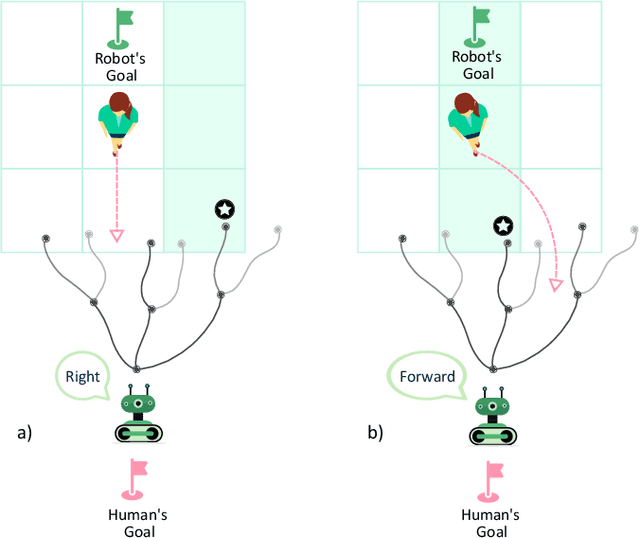
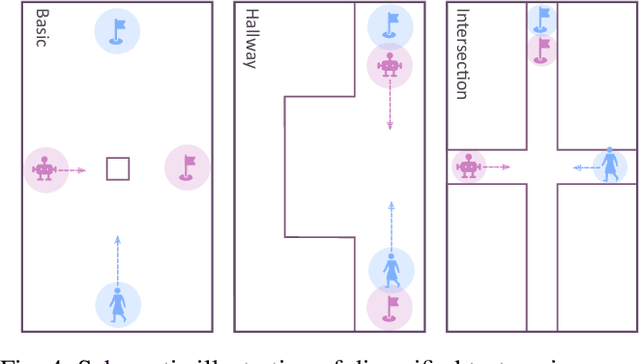
The increasing deployment of robots in co-working scenarios with humans has revealed complex safety and efficiency challenges in the computation robot behavior. Movement among humans is one of the most fundamental -- and yet critical -- problems in this frontier. While several approaches have addressed this problem from a purely navigational point of view, the absence of a unified paradigm for communicating with humans limits their ability to prevent deadlocks and compute feasible solutions. This paper presents a joint communication and motion planning framework that selects from an arbitrary input set of robot's communication signals while computing robot motion plans. It models a human co-worker's imperfect perception of these communications using a noisy sensor model and facilitates the specification of a variety of social/workplace compliance priorities with a flexible cost function. Theoretical results and simulator-based empirical evaluations show that our approach efficiently computes motion plans and communication strategies that reduce conflicts between agents and resolve potential deadlocks.
Contemporary Research Trends in Response Robotics
Apr 28, 2021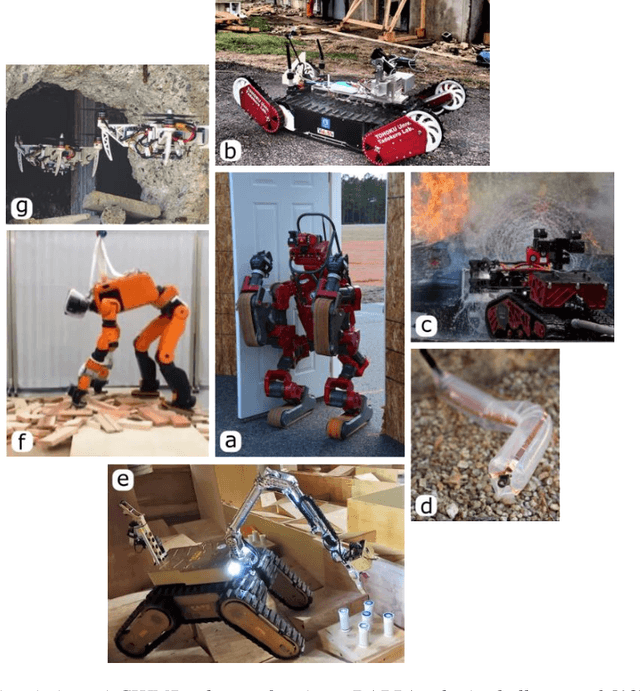

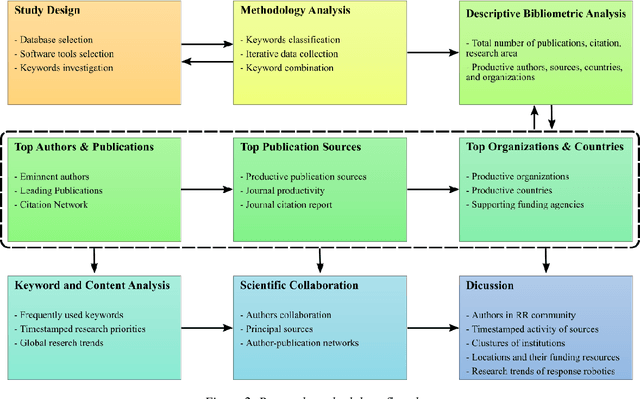
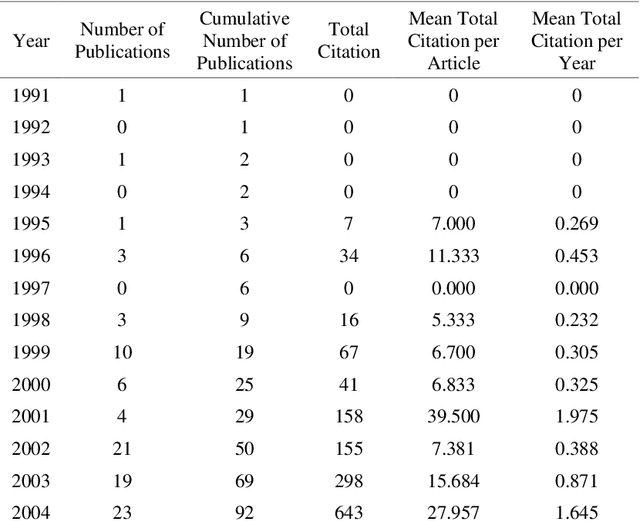
The multidisciplinary nature of response robotics has brought about a diversified research community with extended expertise. Motivated by the recent accelerated rate of publications in the field, this paper analyzes the technical content, statistics, and implications of the literature from bibliometric standpoints. The aim is to study the global progress of response robotics research and identify the contemporary trends. To that end, we investigated the collaboration mapping together with the citation network to formally recognize impactful and contributing authors, publications, sources, institutions, funding agencies, and countries. We found how natural and human-made disasters contributed to forming productive regional research communities, while there are communities that only view response robotics as an application of their research. Furthermore, through an extensive discussion on the bibliometric results, we elucidated the philosophy behind research priority shifts in response robotics and presented our deliberations on future research directions.
Design and Implementation of a Maxi-Sized Mobile Robot for Rescue Missions
Jul 23, 2020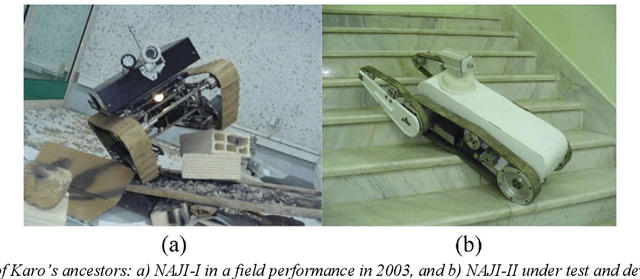
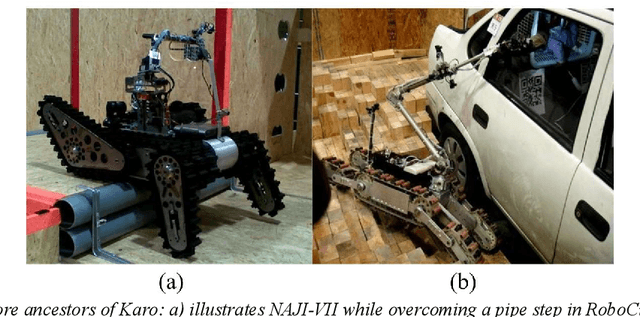
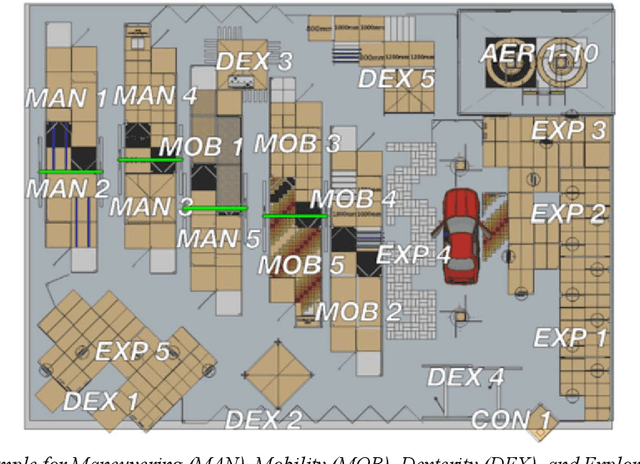
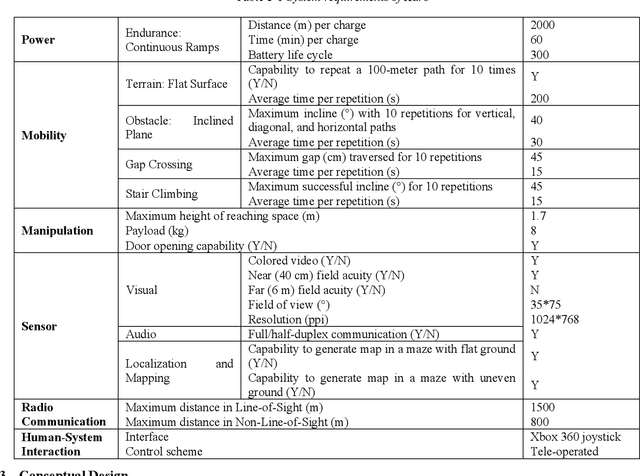
Rescue robots are expected to carry out reconnaissance and dexterity operations in unknown environments comprising unstructured obstacles. Although a wide variety of designs and implementations have been presented within the field of rescue robotics, embedding all mobility, dexterity, and reconnaissance capabilities in a single robot remains a challenging problem. This paper explains the design and implementation of Karo, a mobile robot that exhibits a high degree of mobility at the side of maintaining required dexterity and exploration capabilities for urban search and rescue (USAR) missions. We first elicit the system requirements of a standard rescue robot from the frameworks of Rescue Robot League (RRL) of RoboCup and then, propose the conceptual design of Karo by drafting a locomotion and manipulation system. Considering that, this work presents comprehensive design processes along with detail mechanical design of the robot's platform and its 7-DOF manipulator. Further, we present the design and implementation of the command and control system by discussing the robot's power system, sensors, and hardware systems. In conjunction with this, we elucidate the way that Karo's software system and human-robot interface are implemented and employed. Furthermore, we undertake extensive evaluations of Karo's field performance to investigate whether the principal objective of this work has been satisfied. We demonstrate that Karo has effectively accomplished assigned standardized rescue operations by evaluating all aspects of its capabilities in both RRL's test suites and training suites of a fire department. Finally, the comprehensiveness of Karo's capabilities has been verified by drawing quantitative comparisons between Karo's performance and other leading robots participating in RRL.
Exploration and Coordination of Complementary Multi-Robot Teams In a Hunter and Gatherer Scenario
Dec 12, 2019

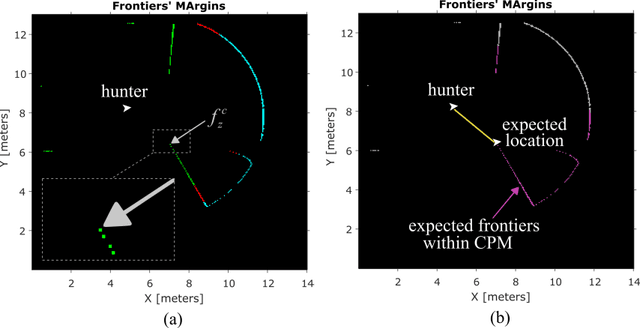
This paper considers the problem of dynamic task allocation, where tasks are unknowingly distributed over an environment. We aim to address the multi-robot exploration aspect of the problem while solving the task-allocation aspect. To that end, we first propose a novel nature-inspired approach called "hunter and gatherer". We consider each task comprised of two sequential subtasks: detection and completion, where each subtask can only be carried out by a certain type of agent. Thus, this approach employs two complementary teams of agents: one agile in detecting (hunters) and another dexterous in completing (gatherers) the tasks. Then, we propose a multi-robot exploration algorithm for hunters and a multi-robot task allocation algorithm for gatherers, both in a distributed manner and based on innovative notions of "certainty and uncertainty profit margins". Statistical analysis of simulation results confirms the efficacy of the proposed algorithms. Besides, it is statistically proven that the proposed solutions function fairly, i.e. for each type of agent, the overall workload is distributed equally.
Multi-Agent Task Allocation in Complementary Teams: A Hunter and Gatherer Approach
Dec 12, 2019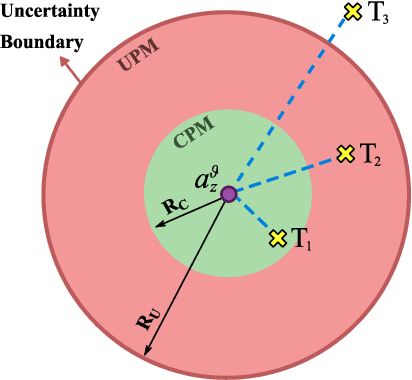
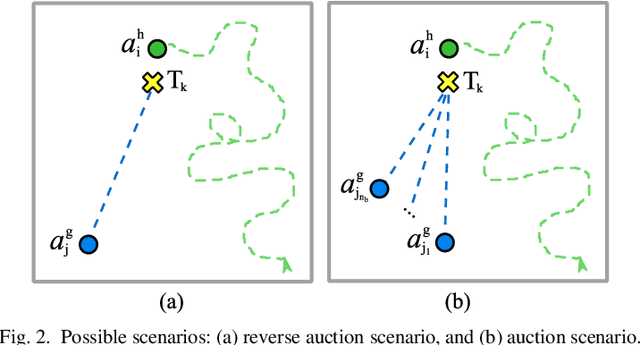
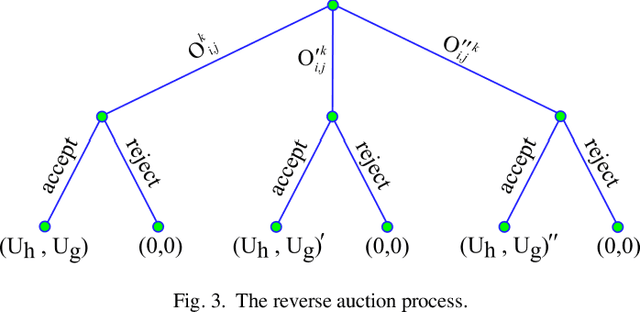
Consider a dynamic task allocation problem, where tasks are unknowingly distributed over an environment. This paper considers each task comprised of two sequential subtasks: detection and completion, where each subtask can only be carried out by a certain type of agent. We address this problem using a novel nature-inspired approach called "hunter and gatherer". The proposed method employs two complementary teams of agents: one agile in detecting (hunters) and another dexterous in completing (gatherers) the tasks. To minimize the collective cost of task accomplishments in a distributed manner, a game-theoretic solution is introduced to couple agents from complementary teams. We utilize market-based negotiation models to develop incentive-based decision-making algorithms relying on innovative notions of "certainty and uncertainty profit margins". The simulation results demonstrate that employing two complementary teams of hunters and gatherers can effectually improve the number of tasks completed by agents compared to conventional methods, while the collective cost of accomplishments is minimized. In addition, the stability and efficacy of the proposed solutions are studied using Nash equilibrium analysis and statistical analysis respectively. It is also numerically shown that the proposed solutions function fairly, i.e. for each type of agent, the overall workload is distributed equally.