 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemantic Segmentation of Textured Non-manifold 3D Meshes using Transformers
Apr 02, 2026Textured 3D meshes jointly represent geometry, topology, and appearance, yet their irregular structure poses significant challenges for deep-learning-based semantic segmentation. While a few recent methods operate directly on meshes without imposing geometric constraints, they typically overlook the rich textural information also provided by such meshes. We introduce a texture-aware transformer that learns directly from raw pixels associated with each mesh face, coupled with a new hierarchical learning scheme for multi-scale feature aggregation. A texture branch summarizes all face-level pixels into a learnable token, which is fused with geometrical descriptors and processed by a stack of Two-Stage Transformer Blocks (TSTB), which allow for both a local and a global information flow. We evaluate our model on the Semantic Urban Meshes (SUM) benchmark and a newly curated cultural-heritage dataset comprising textured roof tiles with triangle-level annotations for damage types. Our method achieves 81.9\% mF1 and 94.3\% OA on SUM and 49.7\% mF1 and 72.8\% OA on the new dataset, substantially outperforming existing approaches.
Open-Vocabulary Semantic Segmentation in Remote Sensing via Hierarchical Attention Masking and Model Composition
Feb 27, 2026In this paper, we propose ReSeg-CLIP, a new training-free Open-Vocabulary Semantic Segmentation method for remote sensing data. To compensate for the problems of vision language models, such as CLIP in semantic segmentation caused by inappropriate interactions within the self-attention layers, we introduce a hierarchical scheme utilizing masks generated by SAM to constrain the interactions at multiple scales. We also present a model composition approach that averages the parameters of multiple RS-specific CLIP variants, taking advantage of a new weighting scheme that evaluates representational quality using varying text prompts. Our method achieves state-of-the-art results across three RS benchmarks without additional training.
Novel View Synthesis with Neural Radiance Fields for Industrial Robot Applications
May 07, 2024Neural Radiance Fields (NeRFs) have become a rapidly growing research field with the potential to revolutionize typical photogrammetric workflows, such as those used for 3D scene reconstruction. As input, NeRFs require multi-view images with corresponding camera poses as well as the interior orientation. In the typical NeRF workflow, the camera poses and the interior orientation are estimated in advance with Structure from Motion (SfM). But the quality of the resulting novel views, which depends on different parameters such as the number and distribution of available images, as well as the accuracy of the related camera poses and interior orientation, is difficult to predict. In addition, SfM is a time-consuming pre-processing step, and its quality strongly depends on the image content. Furthermore, the undefined scaling factor of SfM hinders subsequent steps in which metric information is required. In this paper, we evaluate the potential of NeRFs for industrial robot applications. We propose an alternative to SfM pre-processing: we capture the input images with a calibrated camera that is attached to the end effector of an industrial robot and determine accurate camera poses with metric scale based on the robot kinematics. We then investigate the quality of the novel views by comparing them to ground truth, and by computing an internal quality measure based on ensemble methods. For evaluation purposes, we acquire multiple datasets that pose challenges for reconstruction typical of industrial applications, like reflective objects, poor texture, and fine structures. We show that the robot-based pose determination reaches similar accuracy as SfM in non-demanding cases, while having clear advantages in more challenging scenarios. Finally, we present first results of applying the ensemble method to estimate the quality of the synthetic novel view in the absence of a ground truth.
Image-based Deep Learning for the time-dependent prediction of fresh concrete properties
Feb 09, 2024



Increasing the degree of digitisation and automation in the concrete production process can play a crucial role in reducing the CO$_2$ emissions that are associated with the production of concrete. In this paper, a method is presented that makes it possible to predict the properties of fresh concrete during the mixing process based on stereoscopic image sequences of the concretes flow behaviour. A Convolutional Neural Network (CNN) is used for the prediction, which receives the images supported by information on the mix design as input. In addition, the network receives temporal information in the form of the time difference between the time at which the images are taken and the time at which the reference values of the concretes are carried out. With this temporal information, the network implicitly learns the time-dependent behaviour of the concretes properties. The network predicts the slump flow diameter, the yield stress and the plastic viscosity. The time-dependent prediction potentially opens up the pathway to determine the temporal development of the fresh concrete properties already during mixing. This provides a huge advantage for the concrete industry. As a result, countermeasures can be taken in a timely manner. It is shown that an approach based on depth and optical flow images, supported by information of the mix design, achieves the best results.
Uncertainty Estimation for End-To-End Learned Dense Stereo Matching via Probabilistic Deep Learning
Feb 10, 2020
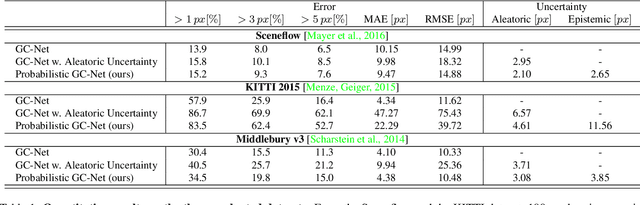
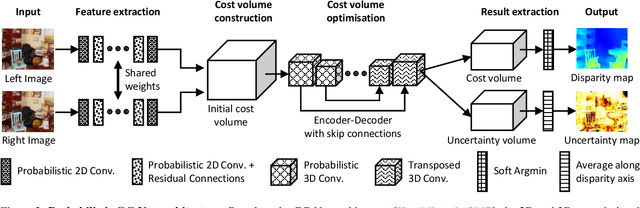

Motivated by the need to identify erroneous disparity assignments, various approaches for uncertainty and confidence estimation of dense stereo matching have been presented in recent years. As in many other fields, especially deep learning based methods have shown convincing results. However, most of these methods only model the uncertainty contained in the data, while ignoring the uncertainty of the employed dense stereo matching procedure. Additionally modelling the latter, however, is particularly beneficial if the domain of the training data varies from that of the data to be processed. For this purpose, in the present work the idea of probabilistic deep learning is applied to the task of dense stereo matching for the first time. Based on the well-known and commonly employed GC-Net architecture, a novel probabilistic neural network is presented, for the task of joint depth and uncertainty estimation from epipolar rectified stereo image pairs. Instead of learning the network parameters directly, the proposed probabilistic neural network learns a probability distribution from which parameters are sampled for every prediction. The variations between multiple such predictions on the same image pair allow to approximate the model uncertainty. The quality of the estimated depth and uncertainty information is assessed in an extensive evaluation on three different datasets.
CNN-based Cost Volume Analysis as Confidence Measure for Dense Matching
May 17, 2019
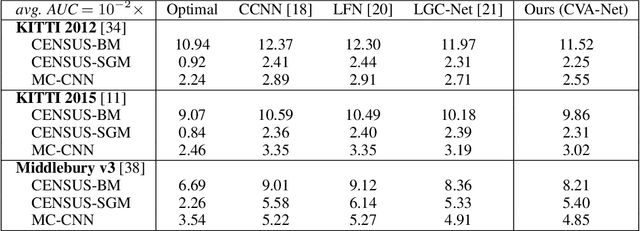

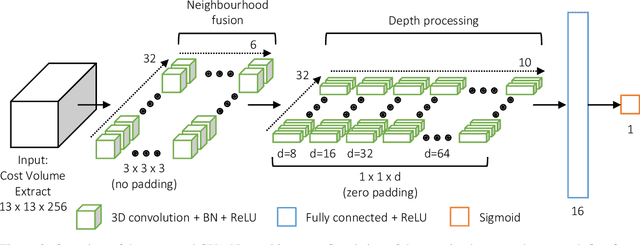
Due to its capability to identify erroneous disparity assignments in dense stereo matching, confidence estimation is beneficial for a wide range of applications, e.g. autonomous driving, which needs a certain degree of confidence as mandatory prerequisite. Especially, the introduction of deep learning based methods resulted in an increasing popularity of this field in recent years, caused by a significantly improved accuracy. Despite this remarkable development, most of these methods rely on features learned from disparity maps only, not taking into account the corresponding 3-dimensional cost volumes. However, it was already demonstrated that with conventional methods based on hand-crafted features this additional information can be used to further increase the accuracy. In order to combine the advantages of deep learning and cost volume based features, in this paper, we propose a novel Convolutional Neural Network (CNN) architecture to directly learn features for confidence estimation from volumetric 3D data. An extensive evaluation on three datasets using three common dense stereo matching techniques demonstrates the generality and state-of-the-art accuracy of the proposed method.