 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSLAck: Semantic, Location, and Appearance Aware Open-Vocabulary Tracking
Sep 17, 2024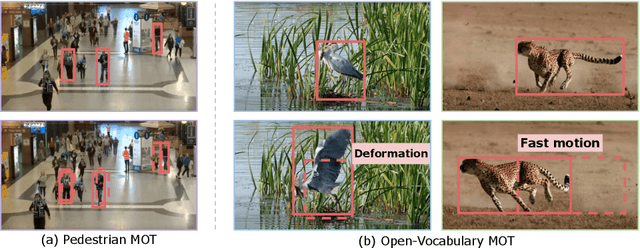
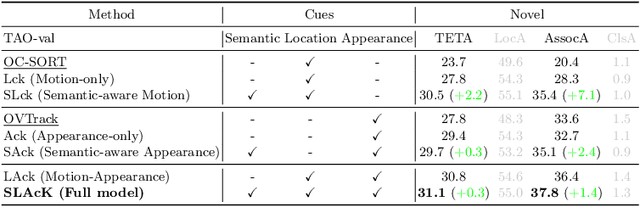
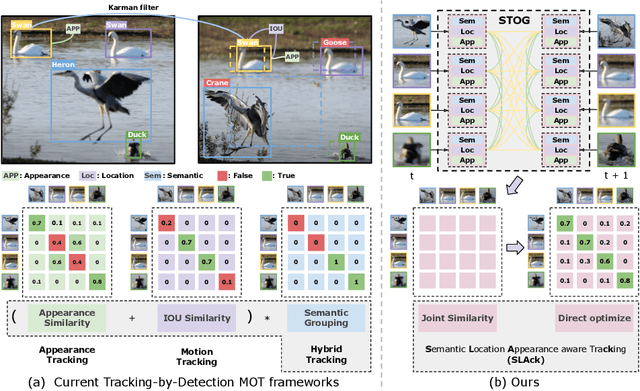
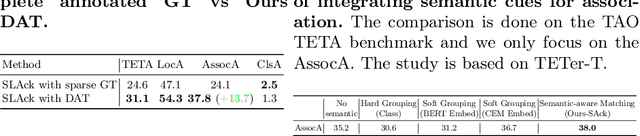
Open-vocabulary Multiple Object Tracking (MOT) aims to generalize trackers to novel categories not in the training set. Currently, the best-performing methods are mainly based on pure appearance matching. Due to the complexity of motion patterns in the large-vocabulary scenarios and unstable classification of the novel objects, the motion and semantics cues are either ignored or applied based on heuristics in the final matching steps by existing methods. In this paper, we present a unified framework SLAck that jointly considers semantics, location, and appearance priors in the early steps of association and learns how to integrate all valuable information through a lightweight spatial and temporal object graph. Our method eliminates complex post-processing heuristics for fusing different cues and boosts the association performance significantly for large-scale open-vocabulary tracking. Without bells and whistles, we outperform previous state-of-the-art methods for novel classes tracking on the open-vocabulary MOT and TAO TETA benchmarks. Our code is available at \href{https://github.com/siyuanliii/SLAck}{github.com/siyuanliii/SLAck}.
A General Framework for Uncertainty Estimation in Deep Learning
Jul 18, 2019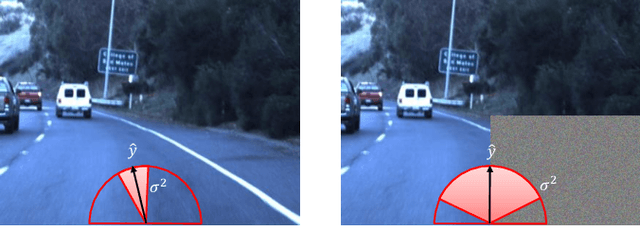
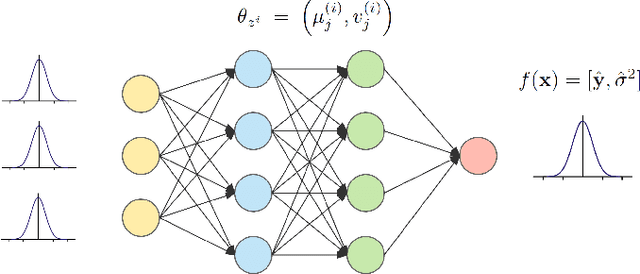
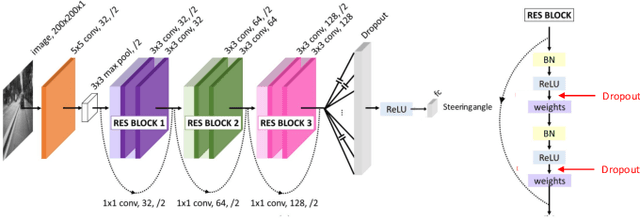
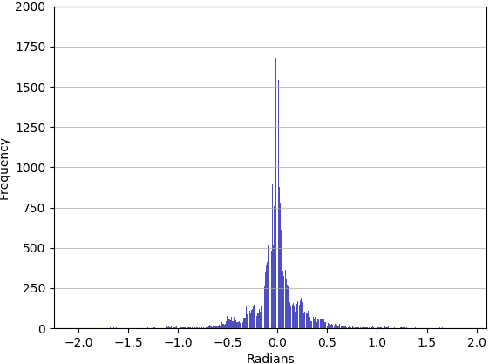
End-to-end learning has recently emerged as a promising technique to tackle the problem of autonomous driving. Existing works show that learning a navigation policy from raw sensor data may reduce the system's reliance on external sensing systems, (e.g. GPS), and/or outperform traditional methods based on state estimation and planning. However, existing end-to-end methods generally trade off performance for safety, hindering their diffusion to real-life applications. For example, when confronted with an input which is radically different from the training data, end-to-end autonomous driving systems are likely to fail, compromising the safety of the vehicle. To detect such failure cases, this work proposes a general framework for uncertainty estimation which enables a policy trained end-to-end to predict not only action commands, but also a confidence about its own predictions. In contrast to previous works, our framework can be applied to any existing neural network and task, without the need to change the network's architecture or loss, or to train the network. In order to do so, we generate confidence levels by forward propagation of input and model uncertainties using Bayesian inference. We test our framework on the task of steering angle regression for an autonomous car, and compare our approach to existing methods with both qualitative and quantitative results on a real dataset. Finally, we show an interesting by-product of our framework: robustness against adversarial attacks.