 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLong-Term, in-the-Wild Study of Feedback about Speech Intelligibility for K-12 Students Attending Class via a Telepresence Robot
Aug 24, 2021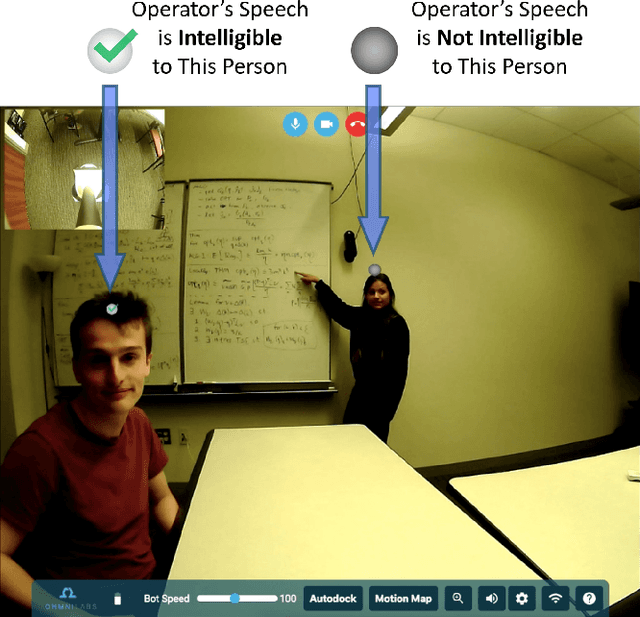

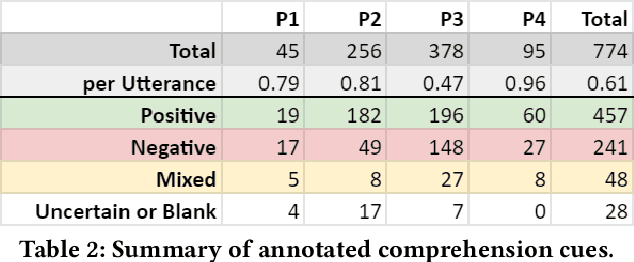
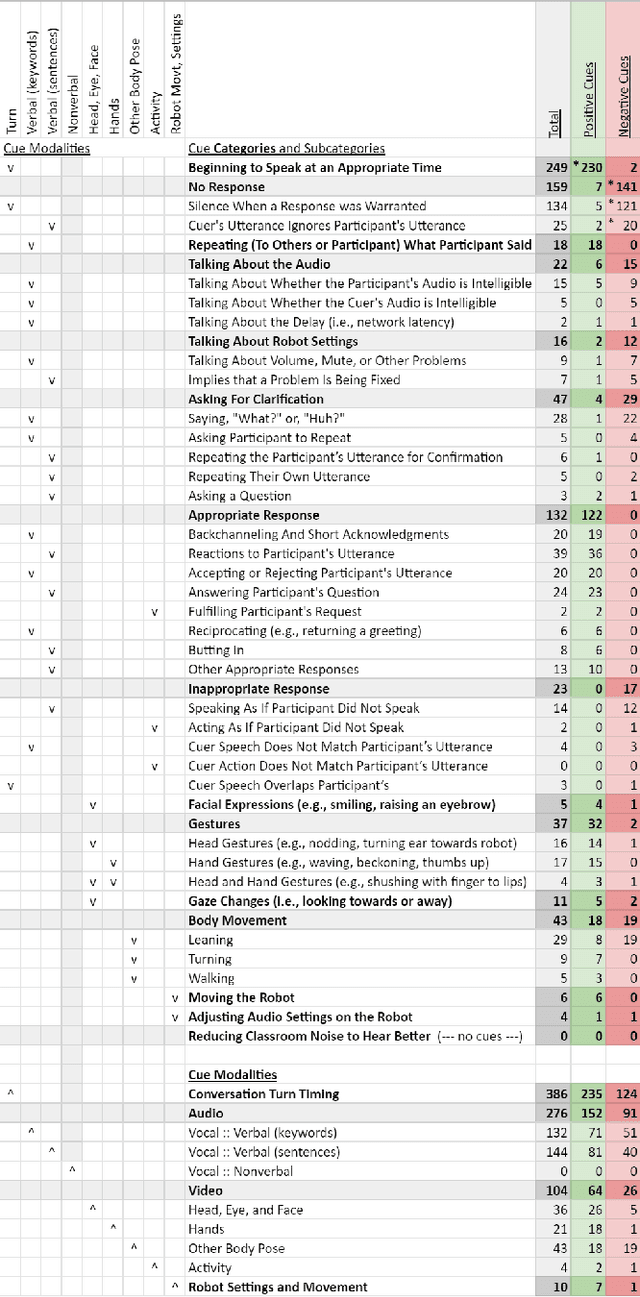
Telepresence robots offer presence, embodiment, and mobility to remote users, making them promising options for homebound K-12 students. It is difficult, however, for robot operators to know how well they are being heard in remote and noisy classroom environments. One solution is to estimate the operator's speech intelligibility to their listeners in order to provide feedback about it to the operator. This work contributes the first evaluation of a speech intelligibility feedback system for homebound K-12 students attending class remotely. In our four long-term, in-the-wild deployments we found that students speak at different volumes instead of adjusting the robot's volume, and that detailed audio calibration and network latency feedback are needed. We also contribute the first findings about the types and frequencies of multimodal comprehension cues given to homebound students by listeners in the classroom. By annotating and categorizing over 700 cues, we found that the most common cue modalities were conversation turn timing and verbal content. Conversation turn timing cues occurred more frequently overall, whereas verbal content cues contained more information and might be the most frequent modality for negative cues. Our work provides recommendations for telepresence systems that could intervene to ensure that remote users are being heard.
Framing Effects on Privacy Concerns about a Home Telepresence Robot
Nov 12, 2019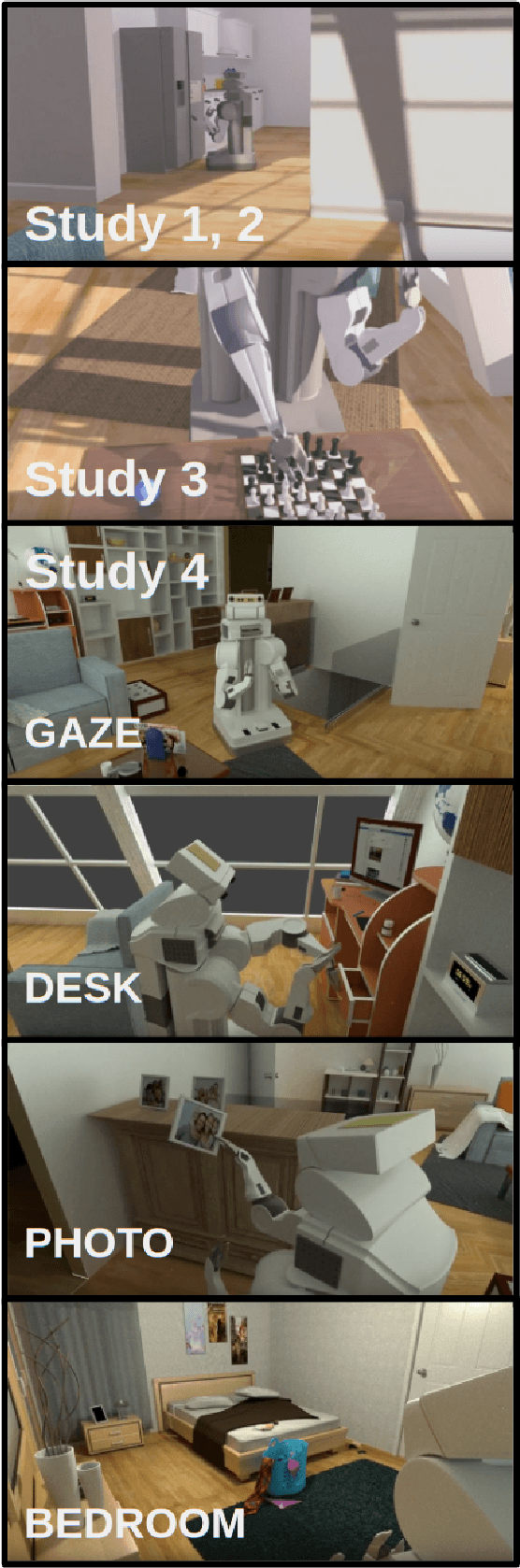
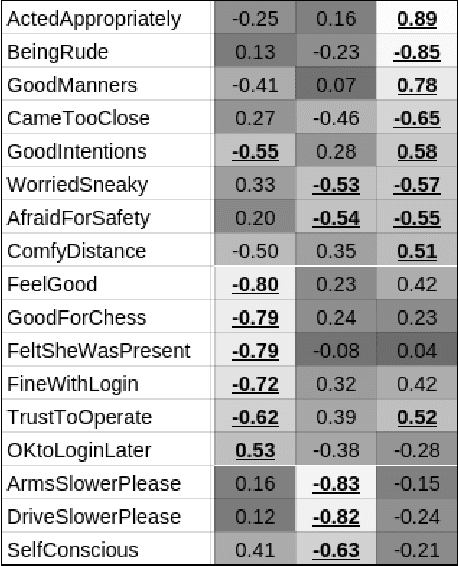
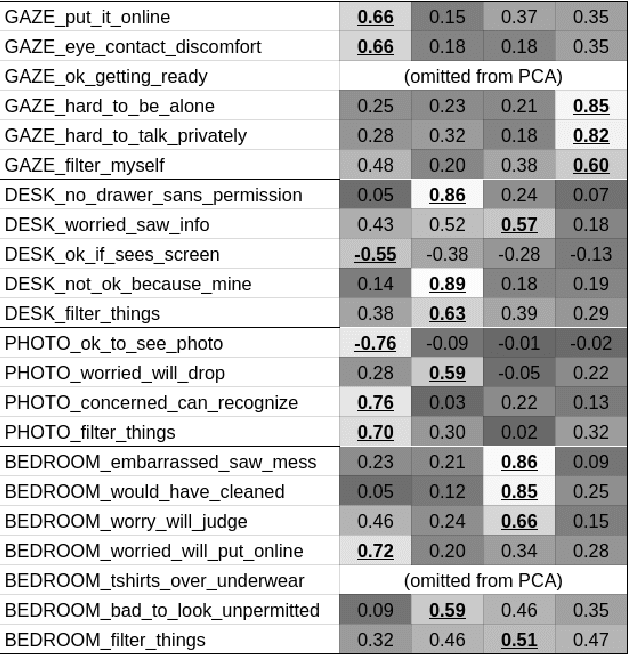
Privacy-sensitive robotics is an emerging area of HRI research. Judgments about privacy would seem to be context-dependent, but none of the promising work on contextual "frames" has focused on privacy concerns. This work studies the impact of contextual "frames" on local users' privacy judgments in a home telepresence setting. Our methodology consists of using an online questionnaire to collect responses to animated videos of a telepresence robot after framing people with an introductory paragraph. The results of four studies indicate a large effect of manipulating the robot operator's identity between a stranger and a close confidante. It also appears that this framing effect persists throughout several videos. These findings serve to caution HRI researchers that a change in frame could cause their results to fail to replicate or generalize. We also recommend that robots be designed to encourage or discourage certain frames.
A Taxonomy of Privacy Constructs for Privacy-Sensitive Robotics
Jan 03, 2017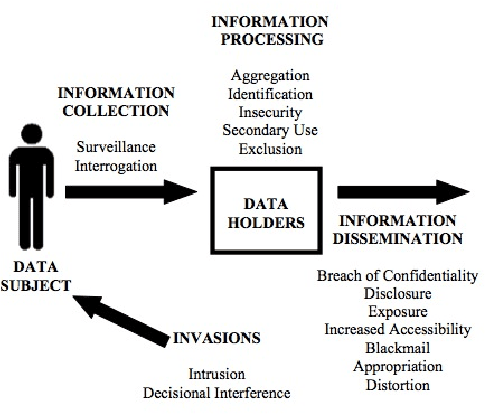
The introduction of robots into our society will also introduce new concerns about personal privacy. In order to study these concerns, we must do human-subject experiments that involve measuring privacy-relevant constructs. This paper presents a taxonomy of privacy constructs based on a review of the privacy literature. Future work in operationalizing privacy constructs for HRI studies is also discussed.