 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Drone Racing with Deep Reinforcement Learning
Mar 15, 2021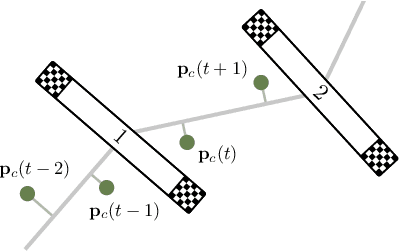

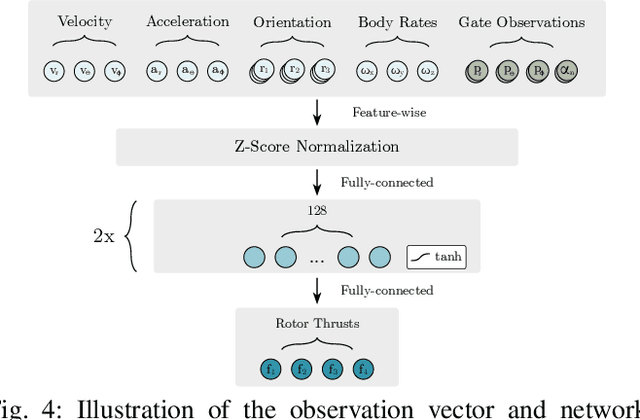

In many robotic tasks, such as drone racing, the goal is to travel through a set of waypoints as fast as possible. A key challenge for this task is planning the minimum-time trajectory, which is typically solved by assuming perfect knowledge of the waypoints to pass in advance. The resulting solutions are either highly specialized for a single-track layout, or suboptimal due to simplifying assumptions about the platform dynamics. In this work, a new approach to minimum-time trajectory generation for quadrotors is presented. Leveraging deep reinforcement learning and relative gate observations, this approach can adaptively compute near-time-optimal trajectories for random track layouts. Our method exhibits a significant computational advantage over approaches based on trajectory optimization for non-trivial track configurations. The proposed approach is evaluated on a set of race tracks in simulation and the real world, achieving speeds of up to 17 m/s with a physical quadrotor.
Self-Supervised Person Detection in 2D Range Data using a Calibrated Camera
Dec 16, 2020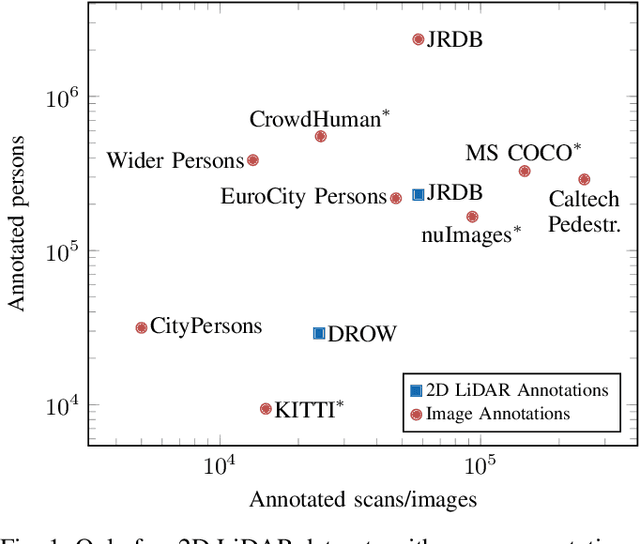
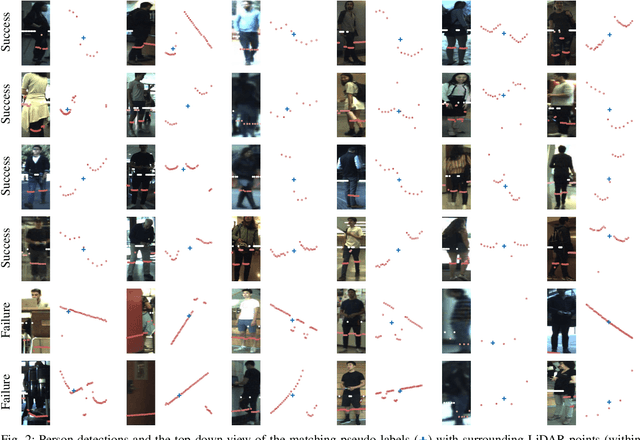


Deep learning is the essential building block of state-of-the-art person detectors in 2D range data. However, only a few annotated datasets are available for training and testing these deep networks, potentially limiting their performance when deployed in new environments or with different LiDAR models. We propose a method, which uses bounding boxes from an image-based detector (e.g. Faster R-CNN) on a calibrated camera to automatically generate training labels (called pseudo-labels) for 2D LiDAR-based person detectors. Through experiments on the JackRabbot dataset with two detector models, DROW3 and DR-SPAAM, we show that self-supervised detectors, trained or fine-tuned with pseudo-labels, outperform detectors trained using manual annotations from a different dataset. Combined with robust training techniques, the self-supervised detectors reach a performance close to the ones trained using manual annotations. Our method is an effective way to improve person detectors during deployment without any additional labeling effort, and we release our source code to support relevant robotic applications.