 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLEROjD: Lidar Extended Radar-Only Object Detection
Sep 09, 2024



Accurate 3D object detection is vital for automated driving. While lidar sensors are well suited for this task, they are expensive and have limitations in adverse weather conditions. 3+1D imaging radar sensors offer a cost-effective, robust alternative but face challenges due to their low resolution and high measurement noise. Existing 3+1D imaging radar datasets include radar and lidar data, enabling cross-modal model improvements. Although lidar should not be used during inference, it can aid the training of radar-only object detectors. We explore two strategies to transfer knowledge from the lidar to the radar domain and radar-only object detectors: 1. multi-stage training with sequential lidar point cloud thin-out, and 2. cross-modal knowledge distillation. In the multi-stage process, three thin-out methods are examined. Our results show significant performance gains of up to 4.2 percentage points in mean Average Precision with multi-stage training and up to 3.9 percentage points with knowledge distillation by initializing the student with the teacher's weights. The main benefit of these approaches is their applicability to other 3D object detection networks without altering their architecture, as we show by analyzing it on two different object detectors. Our code is available at https://github.com/rst-tu-dortmund/lerojd
Multi-Object Tracking based on Imaging Radar 3D Object Detection
Jun 03, 2024



Effective tracking of surrounding traffic participants allows for an accurate state estimation as a necessary ingredient for prediction of future behavior and therefore adequate planning of the ego vehicle trajectory. One approach for detecting and tracking surrounding traffic participants is the combination of a learning based object detector with a classical tracking algorithm. Learning based object detectors have been shown to work adequately on lidar and camera data, while learning based object detectors using standard radar data input have proven to be inferior. Recently, with the improvements to radar sensor technology in the form of imaging radars, the object detection performance on radar was greatly improved but is still limited compared to lidar sensors due to the sparsity of the radar point cloud. This presents a unique challenge for the task of multi-object tracking. The tracking algorithm must overcome the limited detection quality while generating consistent tracks. To this end, a comparison between different multi-object tracking methods on imaging radar data is required to investigate its potential for downstream tasks. The work at hand compares multiple approaches and analyzes their limitations when applied to imaging radar data. Furthermore, enhancements to the presented approaches in the form of probabilistic association algorithms are considered for this task.
Energy-based Potential Games for Joint Motion Forecasting and Control
Dec 04, 2023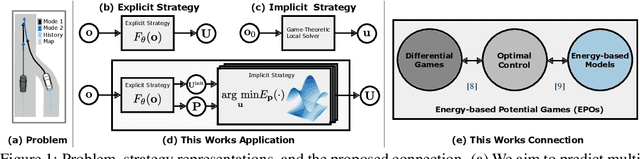
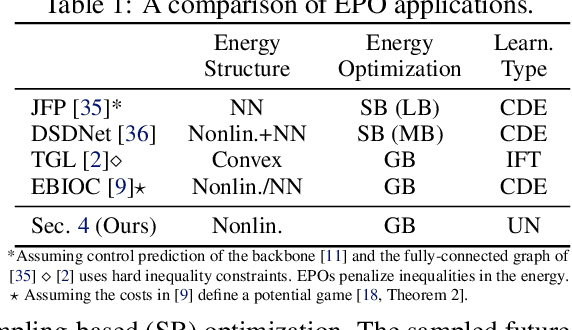
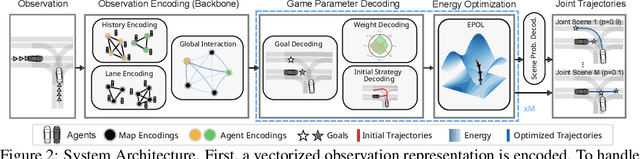
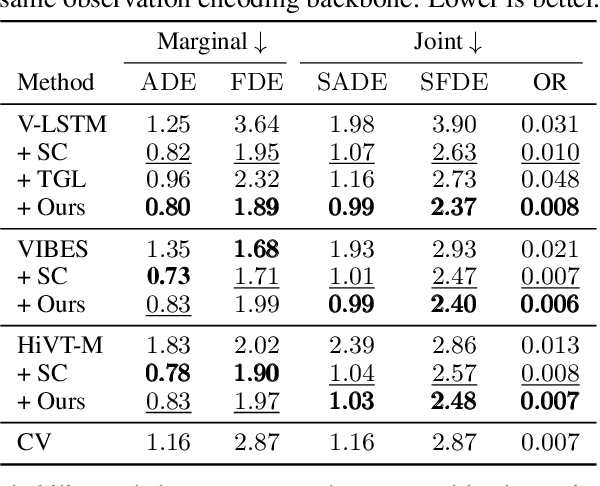
This work uses game theory as a mathematical framework to address interaction modeling in multi-agent motion forecasting and control. Despite its interpretability, applying game theory to real-world robotics, like automated driving, faces challenges such as unknown game parameters. To tackle these, we establish a connection between differential games, optimal control, and energy-based models, demonstrating how existing approaches can be unified under our proposed Energy-based Potential Game formulation. Building upon this, we introduce a new end-to-end learning application that combines neural networks for game-parameter inference with a differentiable game-theoretic optimization layer, acting as an inductive bias. The analysis provides empirical evidence that the game-theoretic layer adds interpretability and improves the predictive performance of various neural network backbones using two simulations and two real-world driving datasets.
On a Connection between Differential Games, Optimal Control, and Energy-based Models for Multi-Agent Interactions
Aug 31, 2023Game theory offers an interpretable mathematical framework for modeling multi-agent interactions. However, its applicability in real-world robotics applications is hindered by several challenges, such as unknown agents' preferences and goals. To address these challenges, we show a connection between differential games, optimal control, and energy-based models and demonstrate how existing approaches can be unified under our proposed Energy-based Potential Game formulation. Building upon this formulation, this work introduces a new end-to-end learning application that combines neural networks for game-parameter inference with a differentiable game-theoretic optimization layer, acting as an inductive bias. The experiments using simulated mobile robot pedestrian interactions and real-world automated driving data provide empirical evidence that the game-theoretic layer improves the predictive performance of various neural network backbones.
UMBRELLA: Uncertainty-Aware Model-Based Offline Reinforcement Learning Leveraging Planning
Nov 23, 2021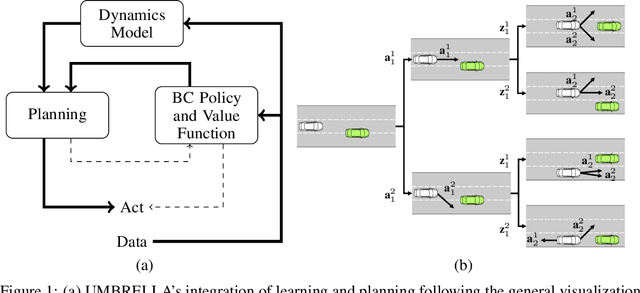

Offline reinforcement learning (RL) provides a framework for learning decision-making from offline data and therefore constitutes a promising approach for real-world applications as automated driving. Self-driving vehicles (SDV) learn a policy, which potentially even outperforms the behavior in the sub-optimal data set. Especially in safety-critical applications as automated driving, explainability and transferability are key to success. This motivates the use of model-based offline RL approaches, which leverage planning. However, current state-of-the-art methods often neglect the influence of aleatoric uncertainty arising from the stochastic behavior of multi-agent systems. This work proposes a novel approach for Uncertainty-aware Model-Based Offline REinforcement Learning Leveraging plAnning (UMBRELLA), which solves the prediction, planning, and control problem of the SDV jointly in an interpretable learning-based fashion. A trained action-conditioned stochastic dynamics model captures distinctively different future evolutions of the traffic scene. The analysis provides empirical evidence for the effectiveness of our approach in challenging automated driving simulations and based on a real-world public dataset.