 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnergy-based Potential Games for Joint Motion Forecasting and Control
Dec 04, 2023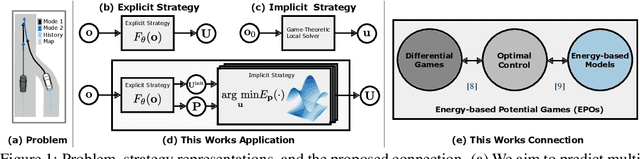
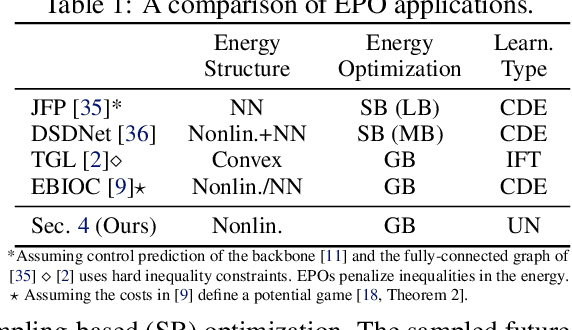
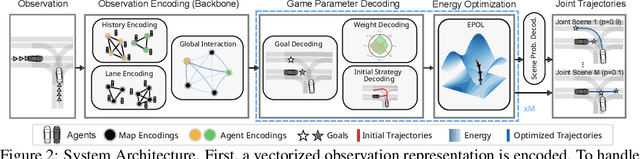
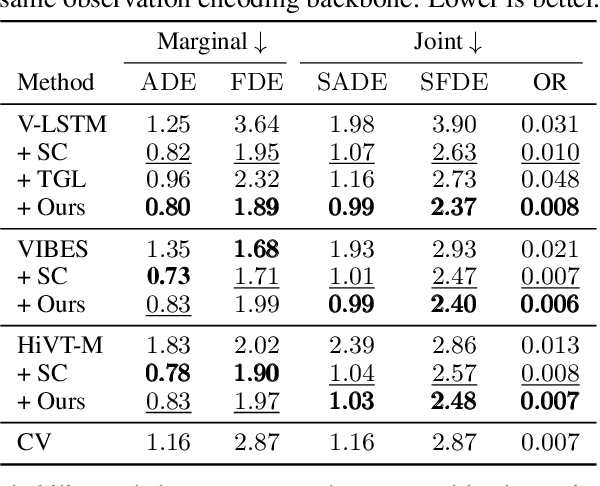
This work uses game theory as a mathematical framework to address interaction modeling in multi-agent motion forecasting and control. Despite its interpretability, applying game theory to real-world robotics, like automated driving, faces challenges such as unknown game parameters. To tackle these, we establish a connection between differential games, optimal control, and energy-based models, demonstrating how existing approaches can be unified under our proposed Energy-based Potential Game formulation. Building upon this, we introduce a new end-to-end learning application that combines neural networks for game-parameter inference with a differentiable game-theoretic optimization layer, acting as an inductive bias. The analysis provides empirical evidence that the game-theoretic layer adds interpretability and improves the predictive performance of various neural network backbones using two simulations and two real-world driving datasets.
On a Connection between Differential Games, Optimal Control, and Energy-based Models for Multi-Agent Interactions
Aug 31, 2023Game theory offers an interpretable mathematical framework for modeling multi-agent interactions. However, its applicability in real-world robotics applications is hindered by several challenges, such as unknown agents' preferences and goals. To address these challenges, we show a connection between differential games, optimal control, and energy-based models and demonstrate how existing approaches can be unified under our proposed Energy-based Potential Game formulation. Building upon this formulation, this work introduces a new end-to-end learning application that combines neural networks for game-parameter inference with a differentiable game-theoretic optimization layer, acting as an inductive bias. The experiments using simulated mobile robot pedestrian interactions and real-world automated driving data provide empirical evidence that the game-theoretic layer improves the predictive performance of various neural network backbones.
What goes around comes around: Cycle-Consistency-based Short-Term Motion Prediction for Anomaly Detection using Generative Adversarial Networks
Aug 08, 2019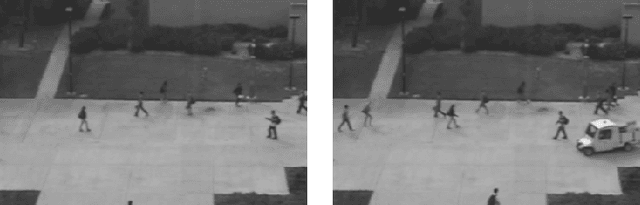
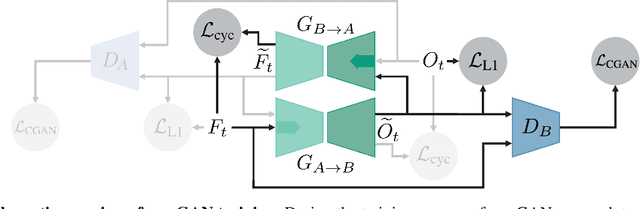
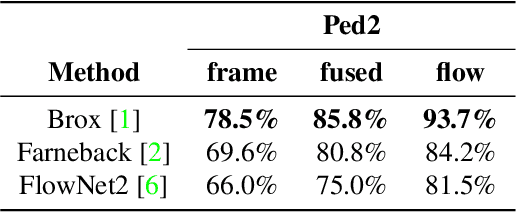
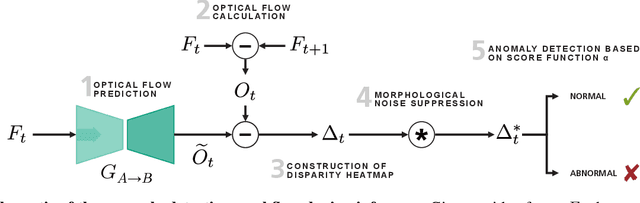
Anomaly detection plays in many fields of research, along with the strongly related task of outlier detection, a very important role. Especially within the context of the automated analysis of video material recorded by surveillance cameras, abnormal situations can be of very different nature. For this purpose this work investigates Generative-Adversarial-Network-based methods (GAN) for anomaly detection related to surveillance applications. The focus is on the usage of static camera setups, since this kind of camera is one of the most often used and belongs to the lower price segment. In order to address this task, multiple subtasks are evaluated, including the influence of existing optical flow methods for the incorporation of short-term temporal information, different forms of network setups and losses for GANs, and the use of morphological operations for further performance improvement. With these extension we achieved up to 2.4% better results. Furthermore, the final method reduced the anomaly detection error for GAN-based methods by about 42.8%.