 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Comparative Study of SMT and MILP for the Nurse Rostering Problem
May 15, 2025



The effects of personnel scheduling on the quality of care and working conditions for healthcare personnel have been thoroughly documented. However, the ever-present demand and large variation of constraints make healthcare scheduling particularly challenging. This problem has been studied for decades, with limited research aimed at applying Satisfiability Modulo Theories (SMT). SMT has gained momentum within the formal verification community in the last decades, leading to the advancement of SMT solvers that have been shown to outperform standard mathematical programming techniques. In this work, we propose generic constraint formulations that can model a wide range of real-world scheduling constraints. Then, the generic constraints are formulated as SMT and MILP problems and used to compare the respective state-of-the-art solvers, Z3 and Gurobi, on academic and real-world inspired rostering problems. Experimental results show how each solver excels for certain types of problems; the MILP solver generally performs better when the problem is highly constrained or infeasible, while the SMT solver performs better otherwise. On real-world inspired problems containing a more varied set of shifts and personnel, the SMT solver excels. Additionally, it was noted during experimentation that the SMT solver was more sensitive to the way the generic constraints were formulated, requiring careful consideration and experimentation to achieve better performance. We conclude that SMT-based methods present a promising avenue for future research within the domain of personnel scheduling.
Hazard Analysis of Collaborative Automation Systems: A Two-layer Approach based on Supervisory Control and Simulation
Sep 26, 2022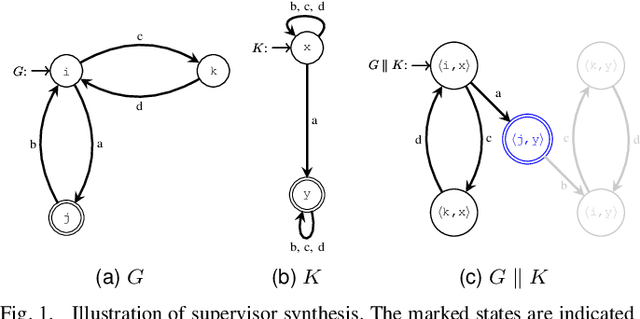
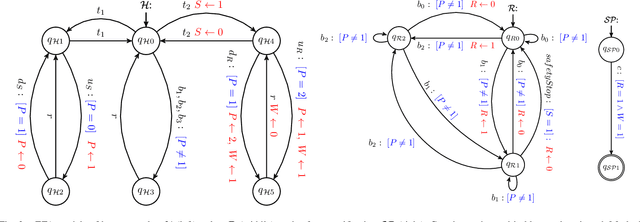
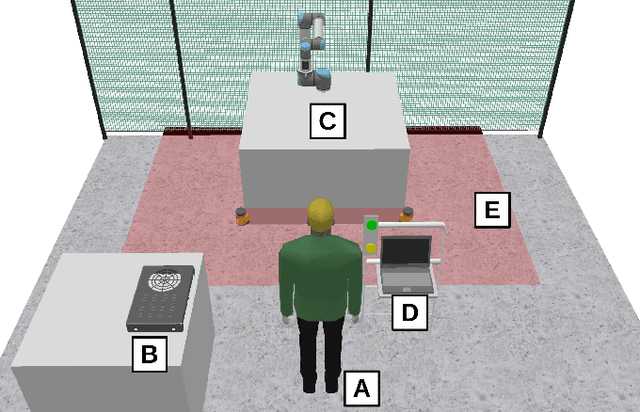
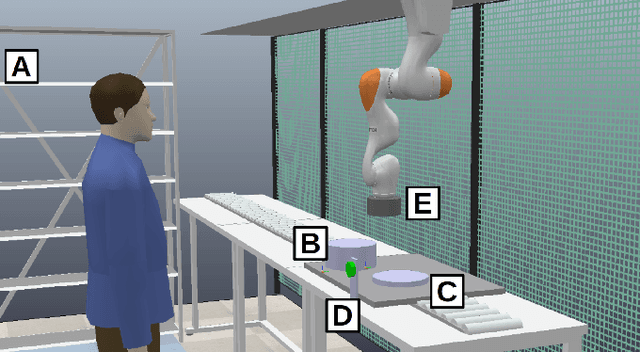
Safety critical systems are typically subjected to hazard analysis before commissioning to identify and analyse potentially hazardous system states that may arise during operation. Currently, hazard analysis is mainly based on human reasoning, past experiences, and simple tools such as checklists and spreadsheets. Increasing system complexity makes such approaches decreasingly suitable. Furthermore, testing-based hazard analysis is often not suitable due to high costs or dangers of physical faults. A remedy for this are model-based hazard analysis methods, which either rely on formal models or on simulation models, each with their own benefits and drawbacks. This paper proposes a two-layer approach that combines the benefits of exhaustive analysis using formal methods with detailed analysis using simulation. Unsafe behaviours that lead to unsafe states are first synthesised from a formal model of the system using Supervisory Control Theory. The result is then input to the simulation where detailed analyses using domain-specific risk metrics are performed. Though the presented approach is generally applicable, this paper demonstrates the benefits of the approach on an industrial human-robot collaboration system.
An SMT Based Compositional Algorithm to Solve a Conflict-Free Electric Vehicle Routing Problem
Jun 30, 2021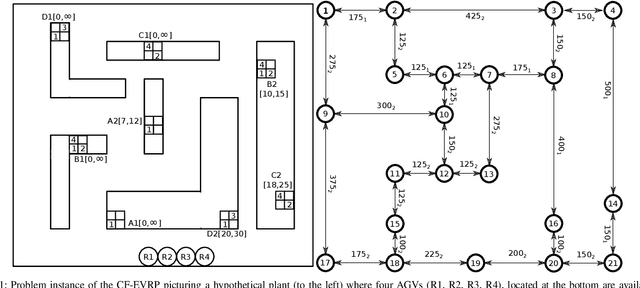
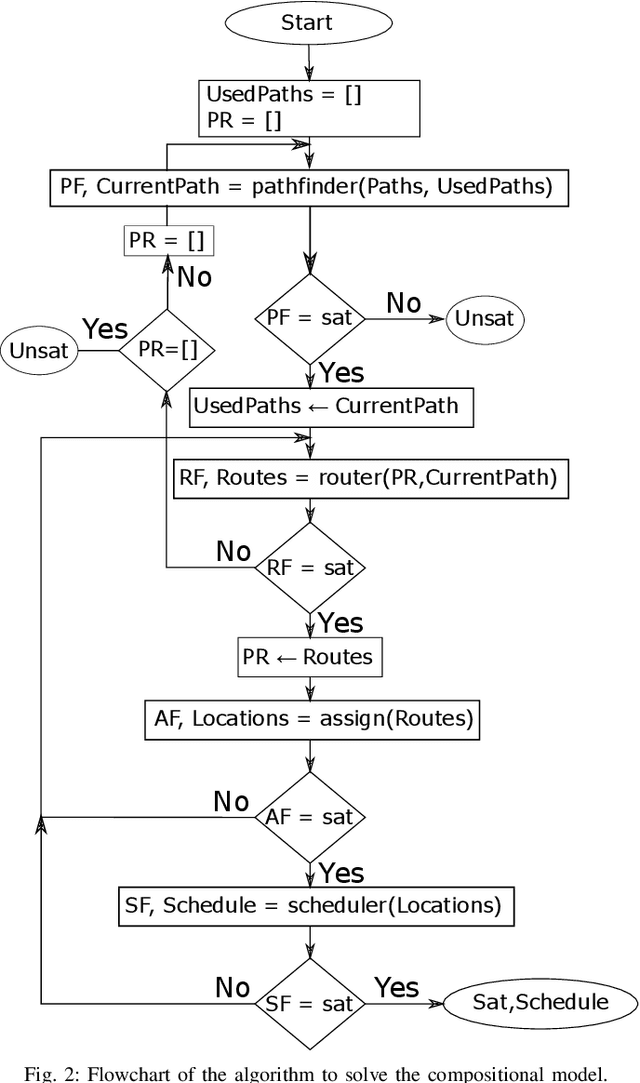
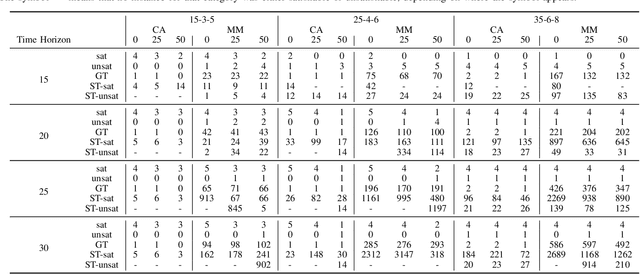
The Vehicle Routing Problem (VRP) is the combinatorial optimization problem of designing routes for vehicles to visit customers in such a fashion that a cost function, typically the number of vehicles, or the total travelled distance is minimized. The problem finds applications in industrial scenarios, for example where Automated Guided Vehicles run through the plant to deliver components from the warehouse. This specific problem, henceforth called the Electric Conflict-Free Vehicle Routing Problem (CF-EVRP), involves constraints such as limited operating range of the vehicles, time windows on the delivery to the customers, and limited capacity on the number of vehicles the road segments can accommodate at the same time. Such a complex system results in a large model that cannot easily be solved to optimality in reasonable time. We therefore developed a compositional model that breaks down the problem into smaller and simpler sub-problems and provides sub-optimal, feasible solutions to the original problem. The algorithm exploits the strengths of SMT solvers, which proved in our previous work to be an efficient approach to deal with scheduling problems. Compared to a monolithic model for the CF-EVRP, written in the SMT standard language and solved using a state-of-the-art SMT solver the compositional model was found to be significantly faster.