 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComputer Vision-based Adaptive Control for Back Exoskeleton Performance Optimization
Aug 08, 2025Back exoskeletons can reduce musculoskeletal strain, but their effectiveness depends on support modulation and adaptive control. This study addresses two challenges: defining optimal support strategies and developing adaptive control based on payload estimation. We introduce an optimization space based on muscle activity reduction, perceived discomfort, and user preference, constructing functions to identify optimal strategies. Experiments with 12 subjects revealed optimal operating regions, highlighting the need for dynamic modulation. Based on these insights, we developed a vision-based adaptive control pipeline that estimates payloads in real-time by enhancing exoskeleton contextual understanding, minimising latency and enabling support adaptation within the defined optimisation space. Validation with 12 more subjects showed over 80% accuracy and improvements across all metrics. Compared to static control, adaptive modulation reduced peak back muscle activation by up to 23% while preserving user preference and minimising discomfort. These findings validate the proposed framework and highlight the potential of intelligent, context-aware control in industrial exoskeletons.
Robot-mediated physical Human-Human Interaction in Neurorehabilitation: a position paper
Jul 23, 2025



Neurorehabilitation conventionally relies on the interaction between a patient and a physical therapist. Robotic systems can improve and enrich the physical feedback provided to patients after neurological injury, but they under-utilize the adaptability and clinical expertise of trained therapists. In this position paper, we advocate for a novel approach that integrates the therapist's clinical expertise and nuanced decision-making with the strength, accuracy, and repeatability of robotics: Robot-mediated physical Human-Human Interaction. This framework, which enables two individuals to physically interact through robotic devices, has been studied across diverse research groups and has recently emerged as a promising link between conventional manual therapy and rehabilitation robotics, harmonizing the strengths of both approaches. This paper presents the rationale of a multidisciplinary team-including engineers, doctors, and physical therapists-for conducting research that utilizes: a unified taxonomy to describe robot-mediated rehabilitation, a framework of interaction based on social psychology, and a technological approach that makes robotic systems seamless facilitators of natural human-human interaction.
Locomotion Mode Transitions: Tackling System- and User-Specific Variability in Lower-Limb Exoskeletons
Nov 20, 2024
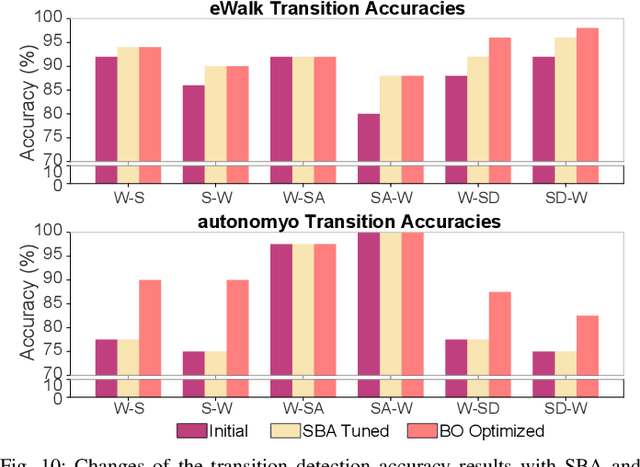
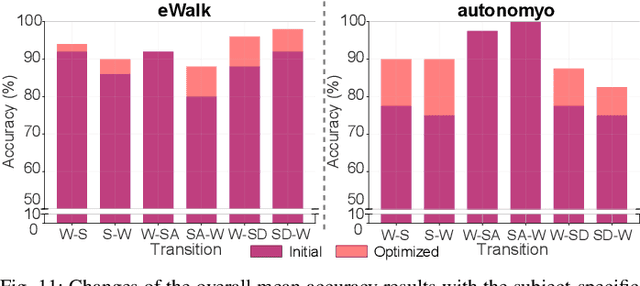
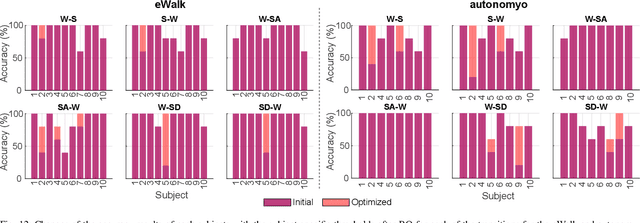
Accurate detection of locomotion transitions, such as walk to sit, walk to stair ascent, and descent, is crucial to effectively control robotic assistive devices, such as lower-limb exoskeletons, as each locomotion mode requires specific assistance. Variability in collected sensor data introduced by user- or system-specific characteristics makes it challenging to maintain high transition detection accuracy while avoiding latency using non-adaptive classification models. In this study, we identified key factors influencing transition detection performance, including variations in user behavior, and different mechanical designs of the exoskeletons. To boost the transition detection accuracy, we introduced two methods for adapting a finite-state machine classifier to system- and user-specific variability: a Statistics-Based approach and Bayesian Optimization. Our experimental results demonstrate that both methods remarkably improve transition detection accuracy across diverse users, achieving up to an 80% increase in certain scenarios compared to the non-personalized threshold method. These findings emphasize the importance of personalization in adaptive control systems, underscoring the potential for enhanced user experience and effectiveness in assistive devices. By incorporating subject- and system-specific data into the model training process, our approach offers a precise and reliable solution for detecting locomotion transitions, catering to individual user needs, and ultimately improving the performance of assistive devices.
Sensorless model-based tension control for a cable-driven exosuit
Jun 26, 2024Cable-driven exosuits have the potential to support individuals with motor disabilities across the continuum of care. When supporting a limb with a cable, force sensors are often used to measure tension. However, force sensors add cost, complexity, and distal components. This paper presents a design and control approach to remove the force sensor from an upper limb cable-driven exosuit. A mechanical design for the exosuit was developed to maximize passive transparency. Then, a data-driven friction identification was conducted on a mannequin test bench to design a model-based tension controller. Seventeen healthy participants raised and lowered their right arms to evaluate tension tracking, movement quality, and muscular effort. Questionnaires on discomfort, physical exertion, and fatigue were collected. The proposed strategy allowed tracking the desired assistive torque with an RMSE of 0.71 Nm (18%) at 50% gravity support. During the raising phase, the EMG signals of the anterior deltoid, trapezius, and pectoralis major were reduced on average compared to the no-suit condition by 30%, 38%, and 38%, respectively. The posterior deltoid activity was increased by 32% during lowering. Position tracking was not significantly altered, whereas movement smoothness significantly decreased. This work demonstrates the feasibility and effectiveness of removing the force sensor from a cable-driven exosuit. A significant increase in discomfort in the lower neck and right shoulder indicated that the ergonomics of the suit could be improved. Overall this work paves the way towards simpler and more affordable exosuits.
Maximizing Performance with Minimal Resources for Real-Time Transition Detection
Oct 06, 2023



Assistive devices, such as exoskeletons and prostheses, have revolutionized the field of rehabilitation and mobility assistance. Efficiently detecting transitions between different activities, such as walking, stair ascending and descending, and sitting, is crucial for ensuring adaptive control and enhancing user experience. We here present an approach for real-time transition detection, aimed at optimizing the processing-time performance. By establishing activity-specific threshold values through trained machine learning models, we effectively distinguish motion patterns and we identify transition moments between locomotion modes. This threshold-based method improves real-time embedded processing time performance by up to 11 times compared to machine learning approaches. The efficacy of the developed finite-state machine is validated using data collected from three different measurement systems. Moreover, experiments with healthy participants were conducted on an active pelvis orthosis to validate the robustness and reliability of our approach. The proposed algorithm achieved high accuracy in detecting transitions between activities. These promising results show the robustness and reliability of the method, reinforcing its potential for integration into practical applications.