 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSensorless model-based tension control for a cable-driven exosuit
Jun 26, 2024Cable-driven exosuits have the potential to support individuals with motor disabilities across the continuum of care. When supporting a limb with a cable, force sensors are often used to measure tension. However, force sensors add cost, complexity, and distal components. This paper presents a design and control approach to remove the force sensor from an upper limb cable-driven exosuit. A mechanical design for the exosuit was developed to maximize passive transparency. Then, a data-driven friction identification was conducted on a mannequin test bench to design a model-based tension controller. Seventeen healthy participants raised and lowered their right arms to evaluate tension tracking, movement quality, and muscular effort. Questionnaires on discomfort, physical exertion, and fatigue were collected. The proposed strategy allowed tracking the desired assistive torque with an RMSE of 0.71 Nm (18%) at 50% gravity support. During the raising phase, the EMG signals of the anterior deltoid, trapezius, and pectoralis major were reduced on average compared to the no-suit condition by 30%, 38%, and 38%, respectively. The posterior deltoid activity was increased by 32% during lowering. Position tracking was not significantly altered, whereas movement smoothness significantly decreased. This work demonstrates the feasibility and effectiveness of removing the force sensor from a cable-driven exosuit. A significant increase in discomfort in the lower neck and right shoulder indicated that the ergonomics of the suit could be improved. Overall this work paves the way towards simpler and more affordable exosuits.
Soft robotic suits: State of the art, core technologies and open challenges
May 30, 2021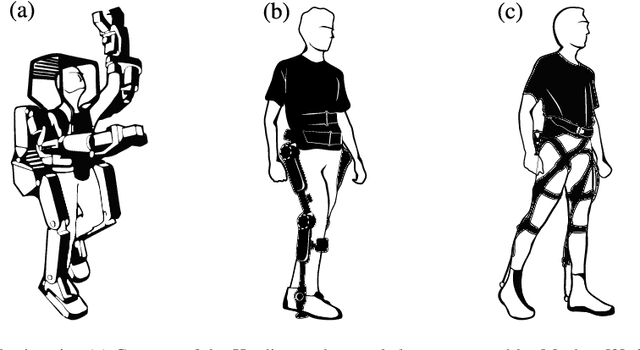
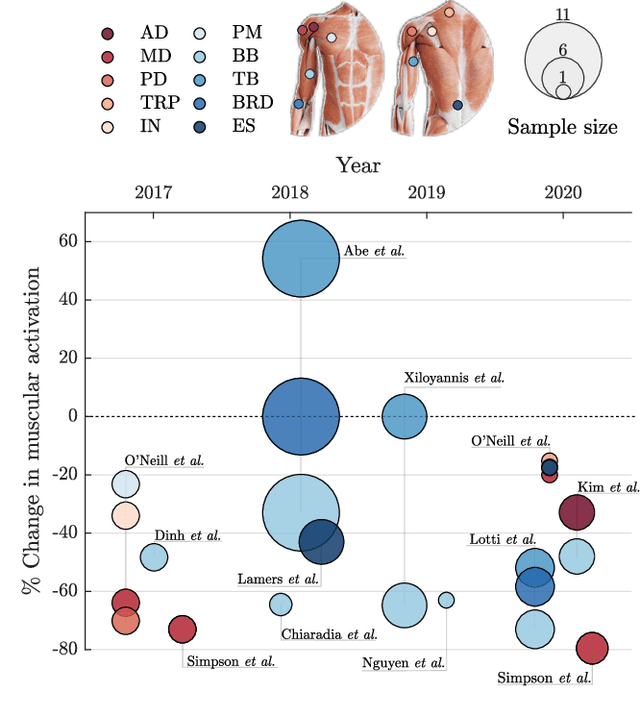
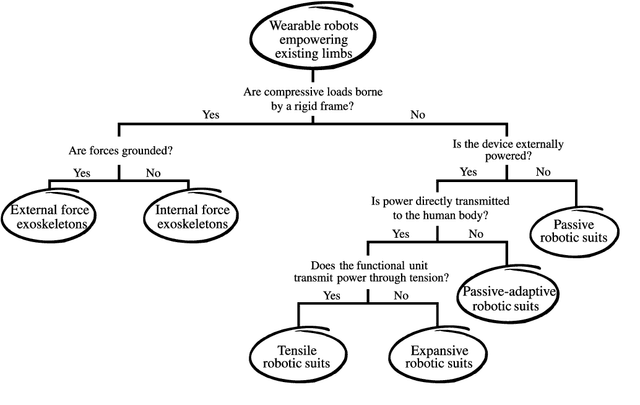
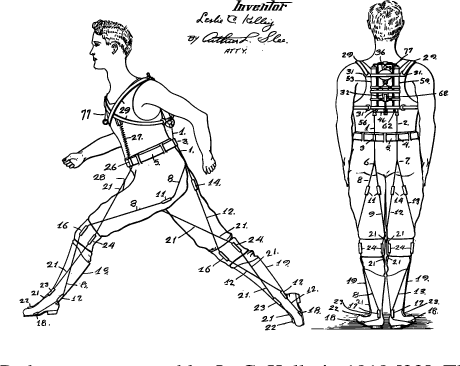
Wearable robots are undergoing a disruptive transition, from the rigid machines that populated the science-fiction world in the early eighties to lightweight robotic apparel, hardly distinguishable from our daily clothes. In less than a decade of development, soft robotic suits have achieved important results in human motor assistance and augmentation. In this paper, we start by giving a definition of soft robotic suits and proposing a taxonomy to classify existing systems. We then critically review the modes of actuation, the physical human-robot interface and the intention-detection strategies of state of the art soft robotic suits, highlighting the advantages and limitations of different approaches. Finally, we discuss the impact of this new technology on human movements, for both augmenting human function and supporting motor impairments, and identify areas that are in need of further development.
* Accepted as a Survey Paper on IEEE Transaction on Robotics