 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnvironment-based Assistance Modulation for a Hip Exosuit via Computer Vision
Nov 28, 2022



Just like in humans vision plays a fundamental role in guiding adaptive locomotion, when designing the control strategy for a walking assistive technology, Computer Vision may bring substantial improvements when performing an environment-based assistance modulation. In this work, we developed a hip exosuit controller able to distinguish among three different walking terrains through the use of an RGB camera and to adapt the assistance accordingly. The system was tested with seven healthy participants walking throughout an overground path comprising of staircases and level ground. Subjects performed the task with the exosuit disabled (Exo Off), constant assistance profile (Vision Off ), and with assistance modulation (Vision On). Our results showed that the controller was able to promptly classify in real-time the path in front of the user with an overall accuracy per class above the 85%, and to perform assistance modulation accordingly. Evaluation related to the effects on the user showed that Vision On was able to outperform the other two conditions: we obtained significantly higher metabolic savings than Exo Off, with a peak of about -20% when climbing up the staircase and about -16% in the overall path, and than Vision Off when ascending or descending stairs. Such advancements in the field may yield to a step forward for the exploitation of lightweight walking assistive technologies in real-life scenarios.
Soft robotic suits: State of the art, core technologies and open challenges
May 30, 2021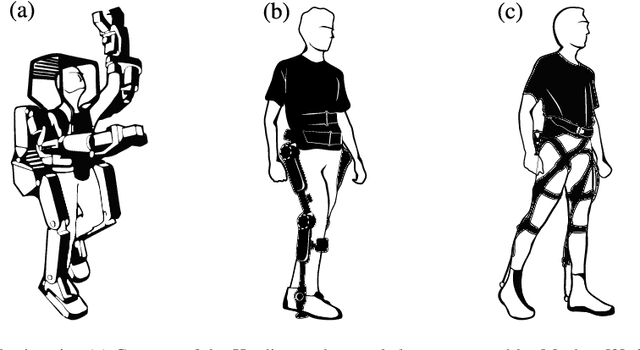
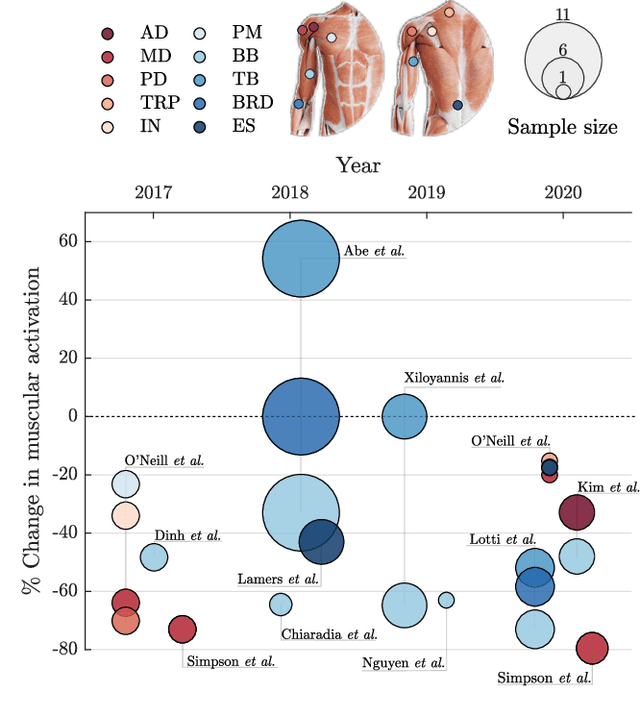
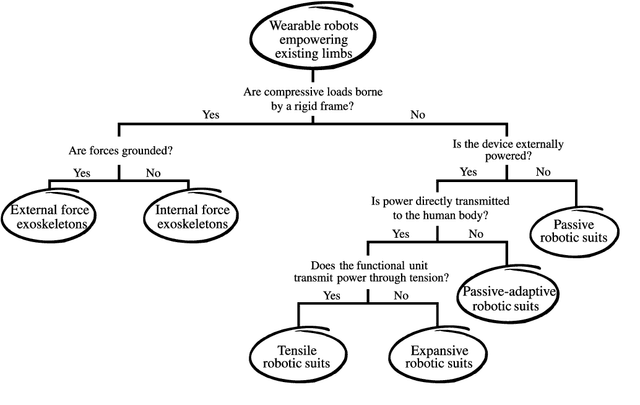
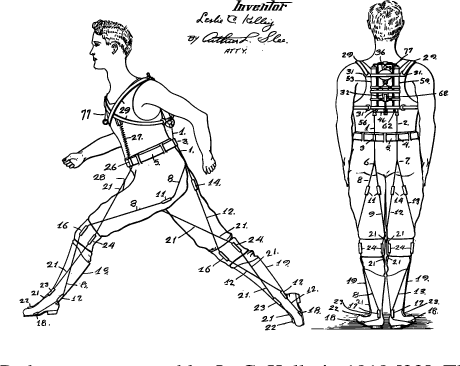
Wearable robots are undergoing a disruptive transition, from the rigid machines that populated the science-fiction world in the early eighties to lightweight robotic apparel, hardly distinguishable from our daily clothes. In less than a decade of development, soft robotic suits have achieved important results in human motor assistance and augmentation. In this paper, we start by giving a definition of soft robotic suits and proposing a taxonomy to classify existing systems. We then critically review the modes of actuation, the physical human-robot interface and the intention-detection strategies of state of the art soft robotic suits, highlighting the advantages and limitations of different approaches. Finally, we discuss the impact of this new technology on human movements, for both augmenting human function and supporting motor impairments, and identify areas that are in need of further development.
* Accepted as a Survey Paper on IEEE Transaction on Robotics