 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLocomotion Mode Transitions: Tackling System- and User-Specific Variability in Lower-Limb Exoskeletons
Nov 20, 2024
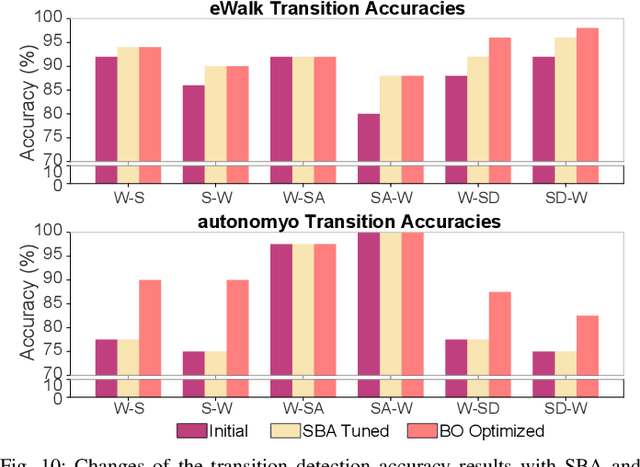
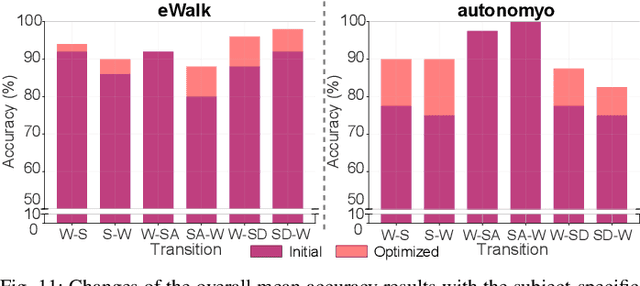
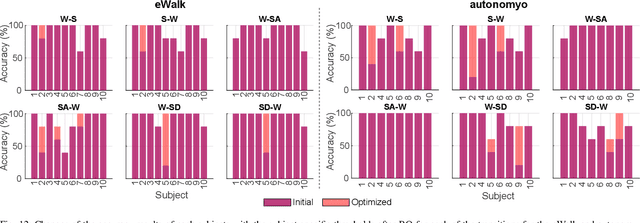
Accurate detection of locomotion transitions, such as walk to sit, walk to stair ascent, and descent, is crucial to effectively control robotic assistive devices, such as lower-limb exoskeletons, as each locomotion mode requires specific assistance. Variability in collected sensor data introduced by user- or system-specific characteristics makes it challenging to maintain high transition detection accuracy while avoiding latency using non-adaptive classification models. In this study, we identified key factors influencing transition detection performance, including variations in user behavior, and different mechanical designs of the exoskeletons. To boost the transition detection accuracy, we introduced two methods for adapting a finite-state machine classifier to system- and user-specific variability: a Statistics-Based approach and Bayesian Optimization. Our experimental results demonstrate that both methods remarkably improve transition detection accuracy across diverse users, achieving up to an 80% increase in certain scenarios compared to the non-personalized threshold method. These findings emphasize the importance of personalization in adaptive control systems, underscoring the potential for enhanced user experience and effectiveness in assistive devices. By incorporating subject- and system-specific data into the model training process, our approach offers a precise and reliable solution for detecting locomotion transitions, catering to individual user needs, and ultimately improving the performance of assistive devices.
ExoRecovery: Push Recovery with a Lower-Limb Exoskeleton based on Stepping Strategy
Oct 31, 2023



Balance loss is a significant challenge in lower-limb exoskeleton applications, as it can lead to potential falls, thereby impacting user safety and confidence. We introduce a control framework for omnidirectional recovery step planning by online optimization of step duration and position in response to external forces. We map the step duration and position to a human-like foot trajectory, which is then translated into joint trajectories using inverse kinematics. These trajectories are executed via an impedance controller, promoting cooperation between the exoskeleton and the user. Moreover, our framework is based on the concept of the divergent component of motion, also known as the Extrapolated Center of Mass, which has been established as a consistent dynamic for describing human movement. This real-time online optimization framework enhances the adaptability of exoskeleton users under unforeseen forces thereby improving the overall user stability and safety. To validate the effectiveness of our approach, simulations, and experiments were conducted. Our push recovery experiments employing the exoskeleton in zero-torque mode (without assistance) exhibit an alignment with the exoskeleton's recovery assistance mode, that shows the consistency of the control framework with human intention. To the best of our knowledge, this is the first cooperative push recovery framework for the lower-limb human exoskeleton that relies on the simultaneous adaptation of intra-stride parameters in both frontal and sagittal directions. The proposed control scheme has been validated with human subject experiments.